 ALLPCB
ALLPCB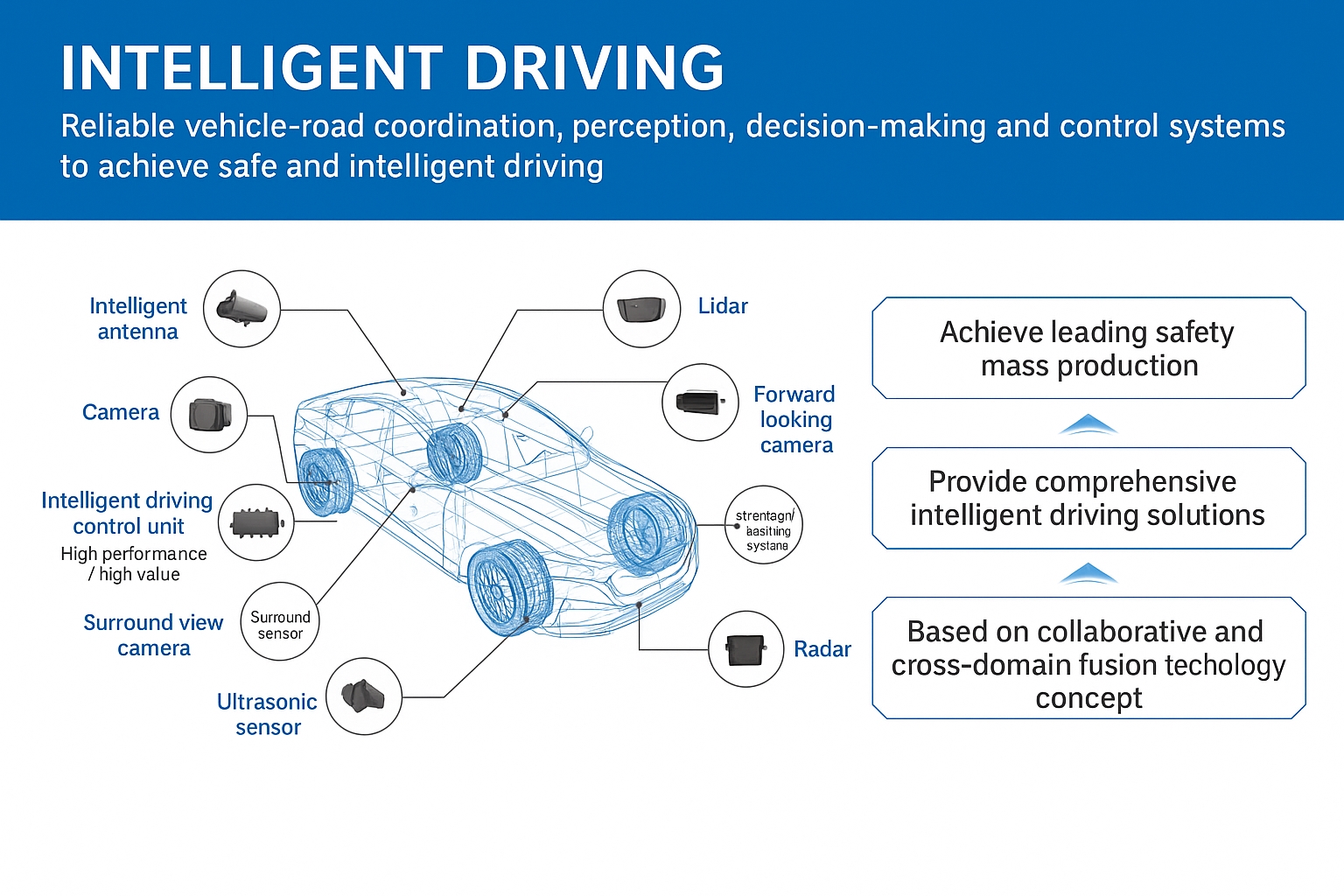
Automotive Radar Technologies Explained
Overview of automotive radar and perception layer for autonomous driving: sensor comparisons, millimeter-wave radar, lidar, camera fusion, and OEM solutions.



Overview of automotive radar and perception layer for autonomous driving: sensor comparisons, millimeter-wave radar, lidar, camera fusion, and OEM solutions.
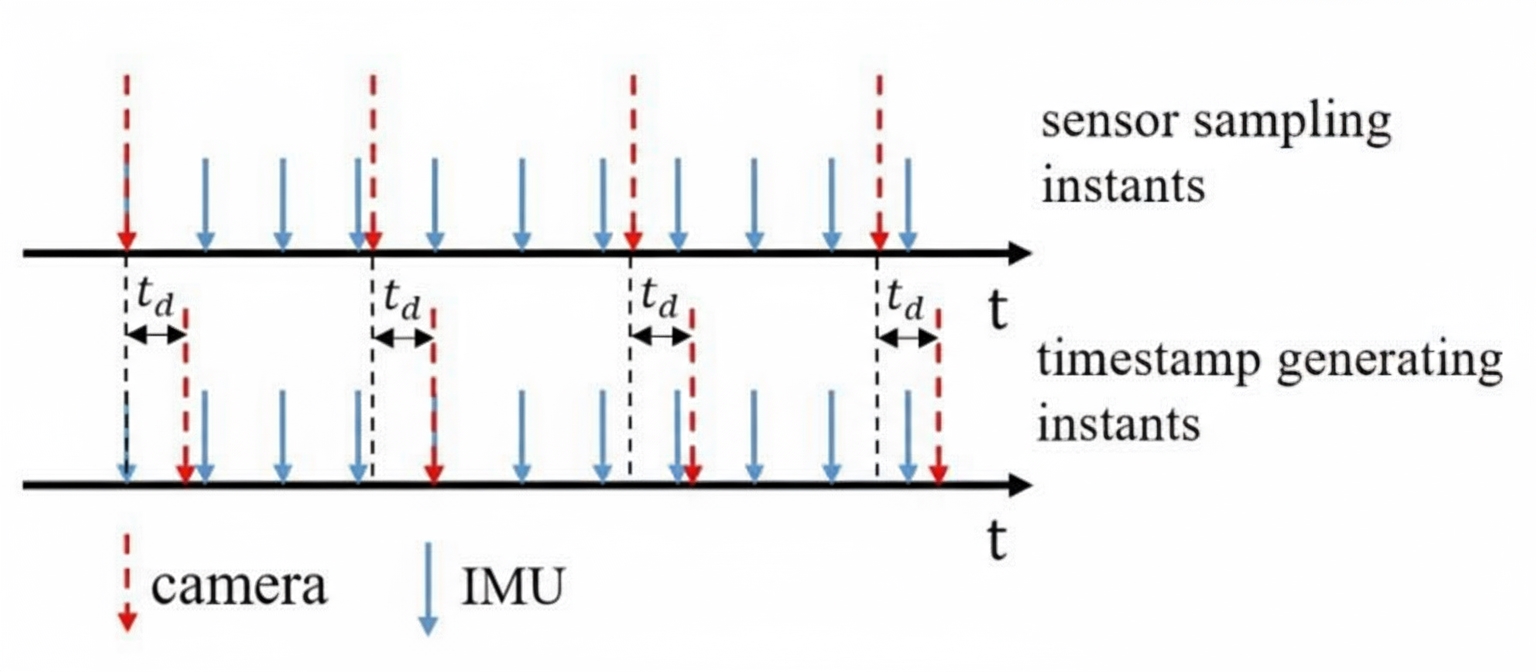
Spatial-temporal calibration guide for sensor fusion, detailing extrinsic calibration methods (co-visibility, hand-eye, in-fusion) and time synchronization techniques.

Analysis of 2025 turning point for humanoid robots and GigaDevice's full-stack chips - GD32 MCUs, Flash, and analog solutions for motion control and sensing.

3D printing and additive manufacturing reviews AI-driven materials, design workflows, FAA-certified parts, and on-demand production for engineers.

Integrated optical microfluidic sensor using color-switching hydrogel for non-contact, high-resolution (≈10–20 mbar) 2D pressure mapping.
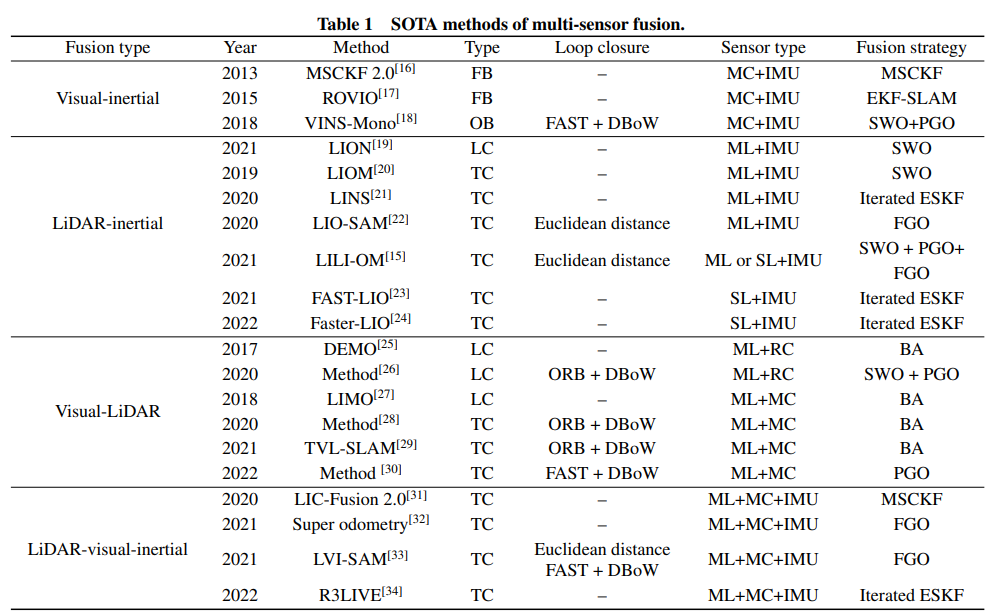
Comprehensive review of Kalman filters, sliding-window optimization and multisensor SLAM fusion (visual, LiDAR, IMU) with open-source algorithms.

Chuo University uses CNT ultrabroad MMW-IR photo-imager and computer vision for non-destructive 3D multilayer reconstruction of hidden defects.
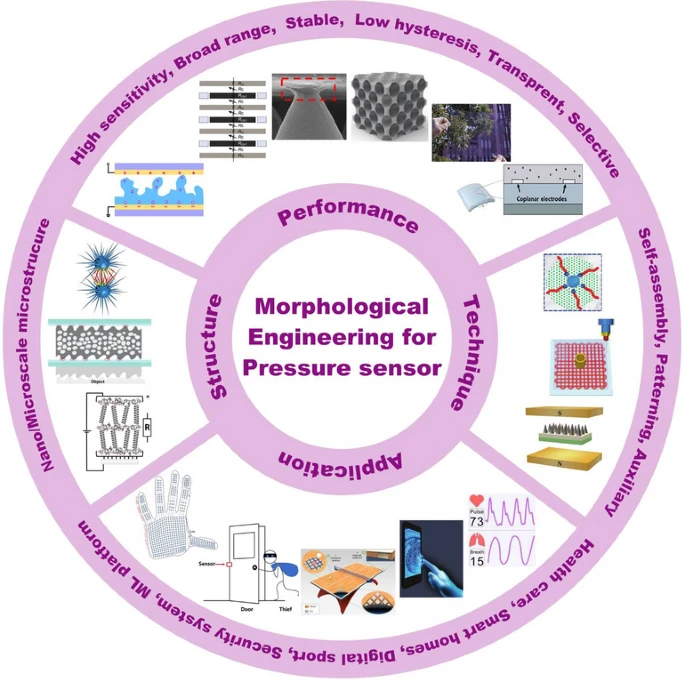
Flexible Bi-Te 3D spiral temperature-pressure sensor for wearable electronic skin—high sensitivity, fast <1s response, dual-parameter mapping.
Explore CCD clocking and nonstandard voltages: datasheet examples, four-phase and multi-phase readout schemes for image sensors.
Learn SLAM basics: how robots use LiDAR, cameras, and IMUs plus motion models, feature extraction, and filtering to map environments and localize.

Compare CCD architectures: full-frame, frame-transfer, interline-transfer; how they work, pros, cons and trade-offs for imaging.

Guide to powering IEPE sensors: constant-current supplies, CRDs, readout options, and comparison with charge-output sensors.
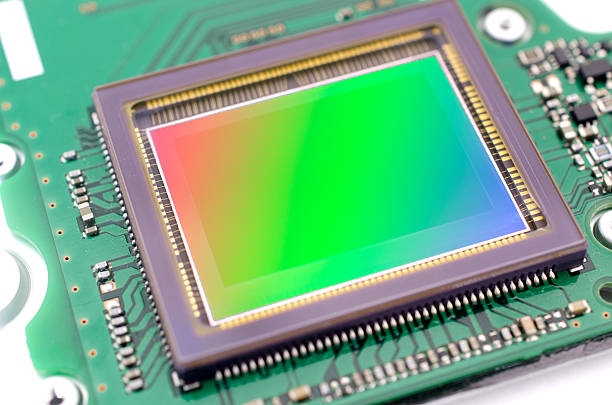
CMOS vs CCD image sensors: principles, pixel types (passive, active, PPD), noise, FSI/BSI/stacked processes, global shutter and HDR advances.

Explore engineering power (EP) for shared power/data, SPI over long distances, LC filtering, and voltage-drop analysis.
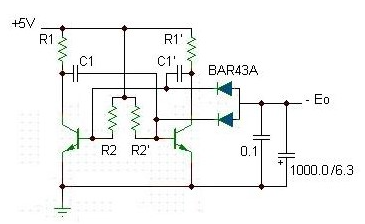
Boost a low-noise negative voltage converter with a potentiometer and 0.1-1 mH inductor - ~25% more output, less noise, key parts and monitoring tips

Miniature thermostat using 40 AWG copper as combined sensor-heater: I2R self-heating, resistor-set temperature control, calibration & mounting tips

Explore ADAS sensors - MEMS, LiDAR, radar, cameras, ultrasonic and why multi-sensor fusion is key to autonomous driving.
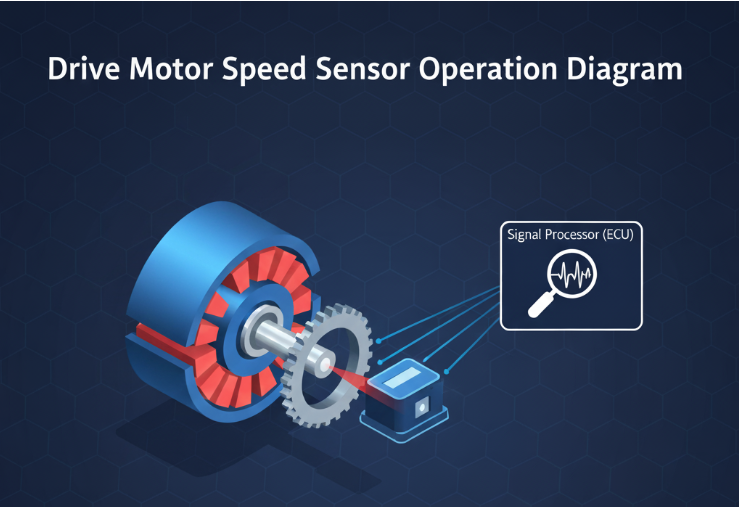
Drive motor speed sensor: excitation with sine/cosine coils detects rotor position, speed and direction, sending signals to control module and VCU.
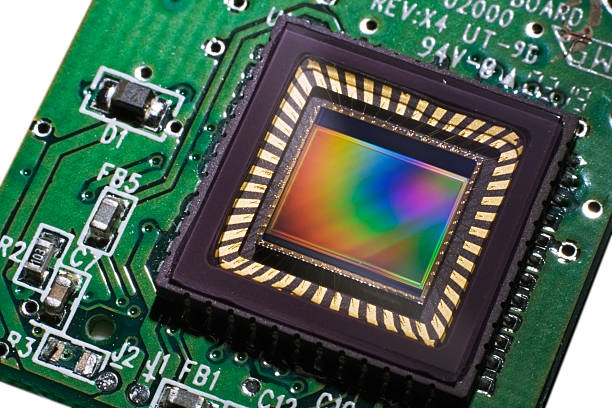
Explore CCD sensors: principles, MOS capacitor pixels, signal generation/transfer, CCD types (IT, FT, FFT, BSI, TDI), applications vs CMOS.
Automotive LiDAR safety: Class 1, IEC 60825-1 compliant systems protect eye and skin, offering reliable 3D sensing day or night.