 ALLPCB
ALLPCB
PROFINET Control with UKA Robot System 8.7
Technical reference for using KRL IOCTL commands to couple/decouple PROFINET devices, adjust coupling timeouts, query device status, control bus-fault handling, and restart bus.



Technical reference for using KRL IOCTL commands to couple/decouple PROFINET devices, adjust coupling timeouts, query device status, control bus-fault handling, and restart bus.
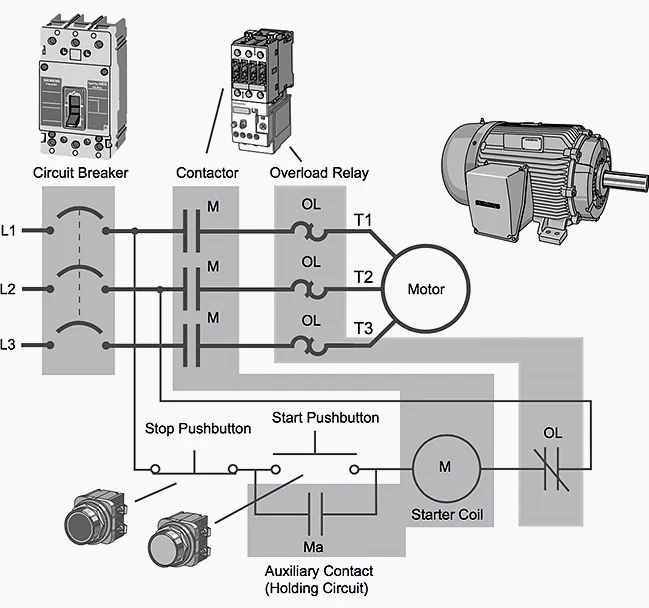
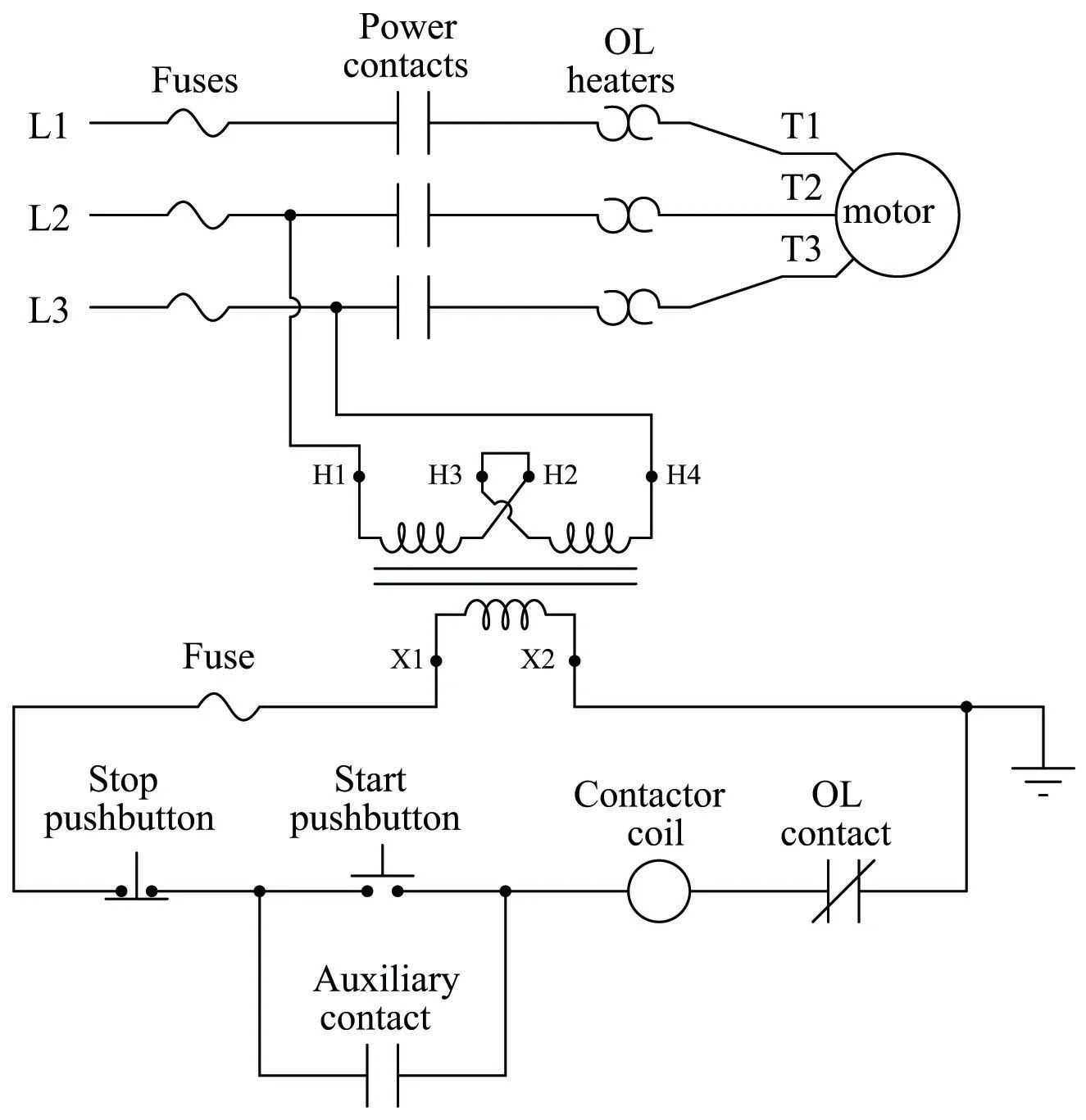
Evaluates whether a PLC can directly drive a contactor, detailing PLC output types, relay modules, output current and supply voltage requirements for coil driving.
Compare turbocharged engines and naturally aspirated engines: operating principles, performance trade-offs, turbo lag, efficiency, and maintenance implications for vehicles.
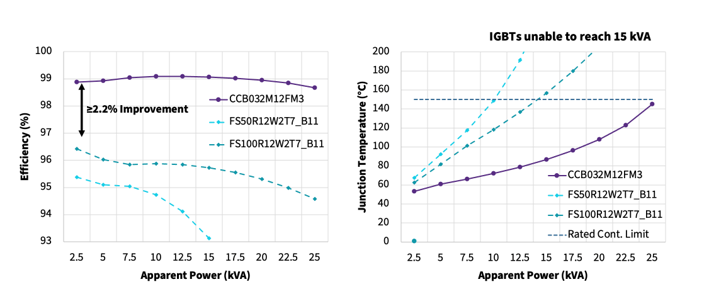
Analysis of Wolfspeed SiC power modules in a 25 kW three-phase low-voltage motor drive: losses, thermal behavior, heatsink size, and system efficiency tradeoffs.

Practical guide to PLC commissioning and installation: procedures for lab tests, on-site wiring, grounding, signal attenuation, I/O verification and commissioning precautions.
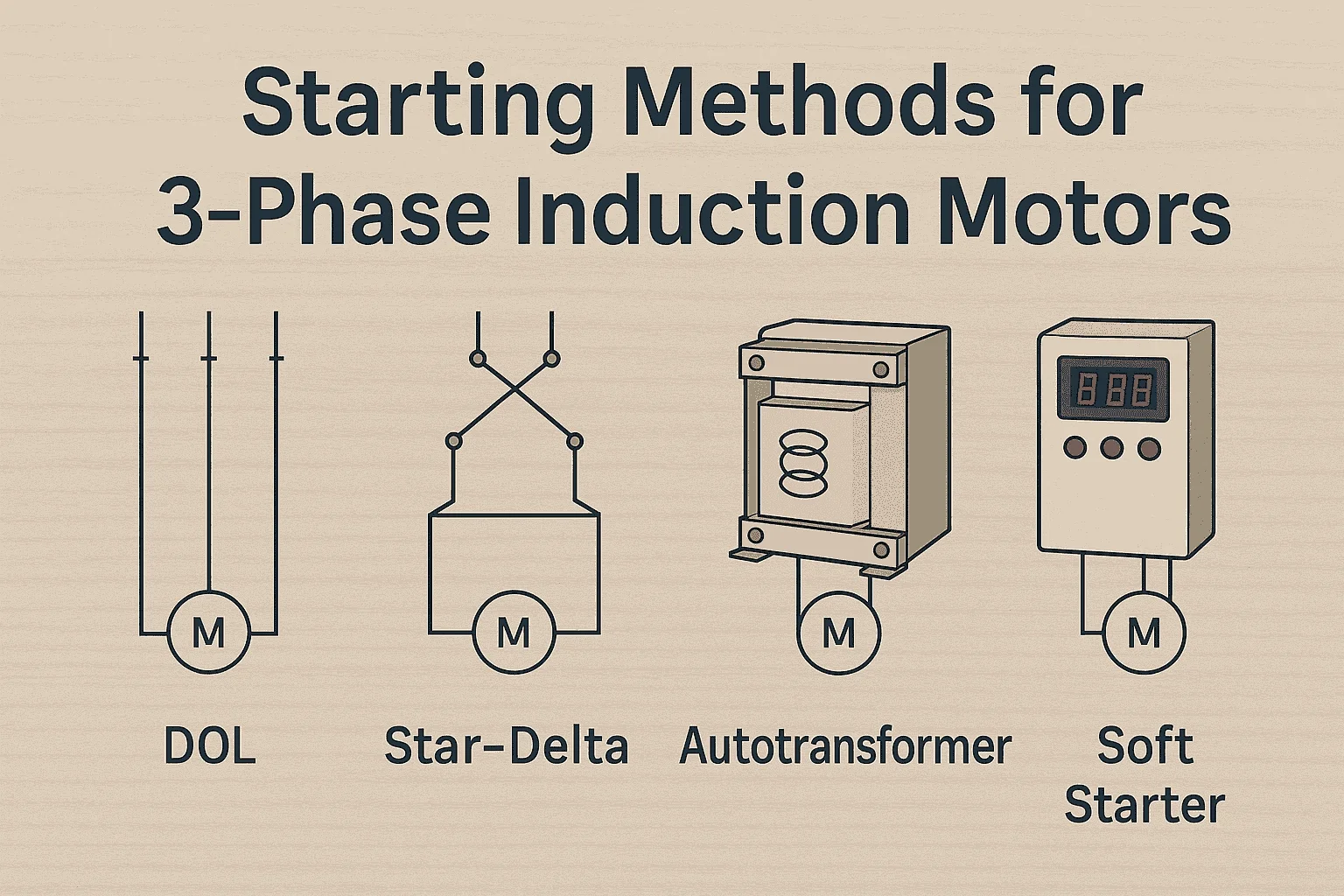
Technical comparison of common motor starting methods: DOL, autotransformer, star-delta, soft starter and VFD; covers principles, torque, cost, controllability and maintenance.
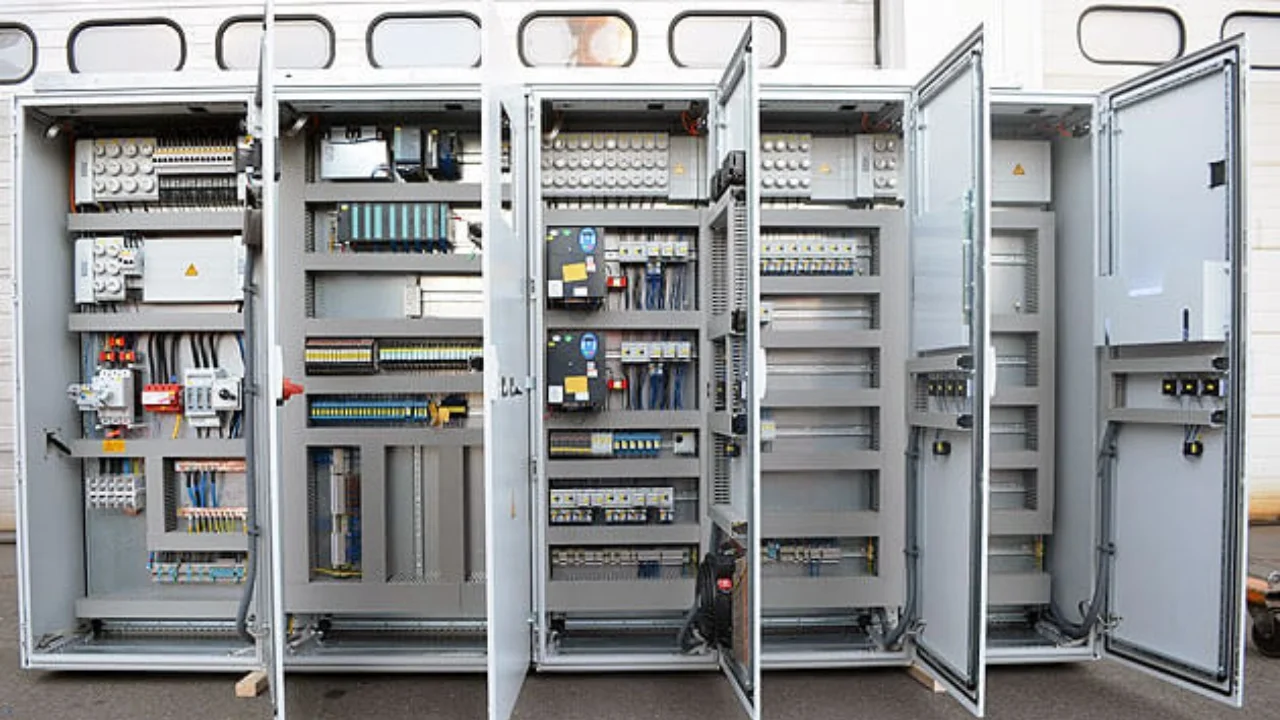
Guide to control cabinet maintenance and PLC maintenance: procedures for inspection, grounding, cleaning, backups, fans, thermal checks and safety protocols.

Technical guide to VFD output voltage, frequency, starting torque, cooling, transfer control and capacity selection, including altitude and temperature derating considerations.
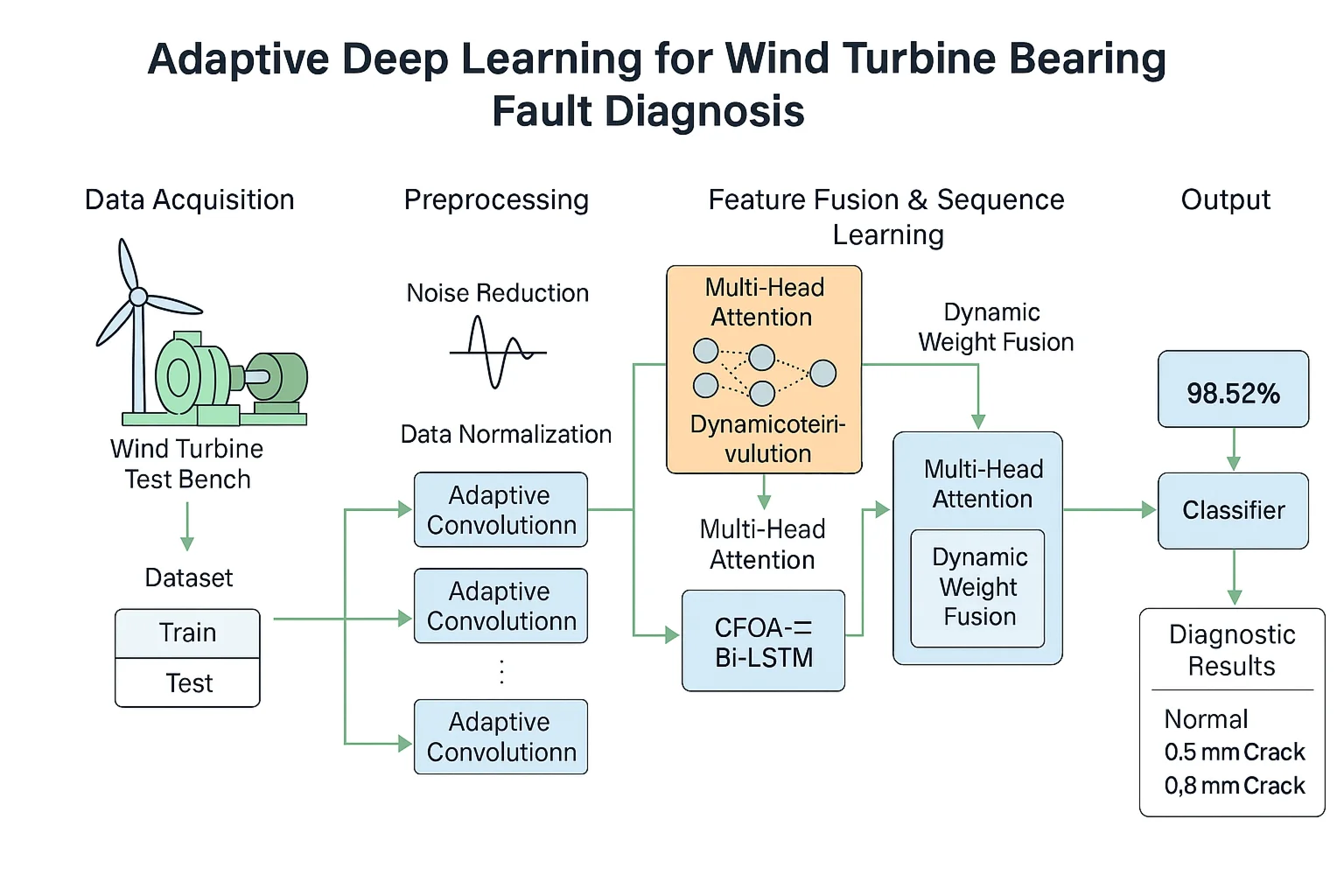
Review of five bearing fault diagnosis methods: auditory inspection, vibration analysis, temperature monitoring, lubricant ferrography, and acoustic emission testing with practical diagnostic tips.
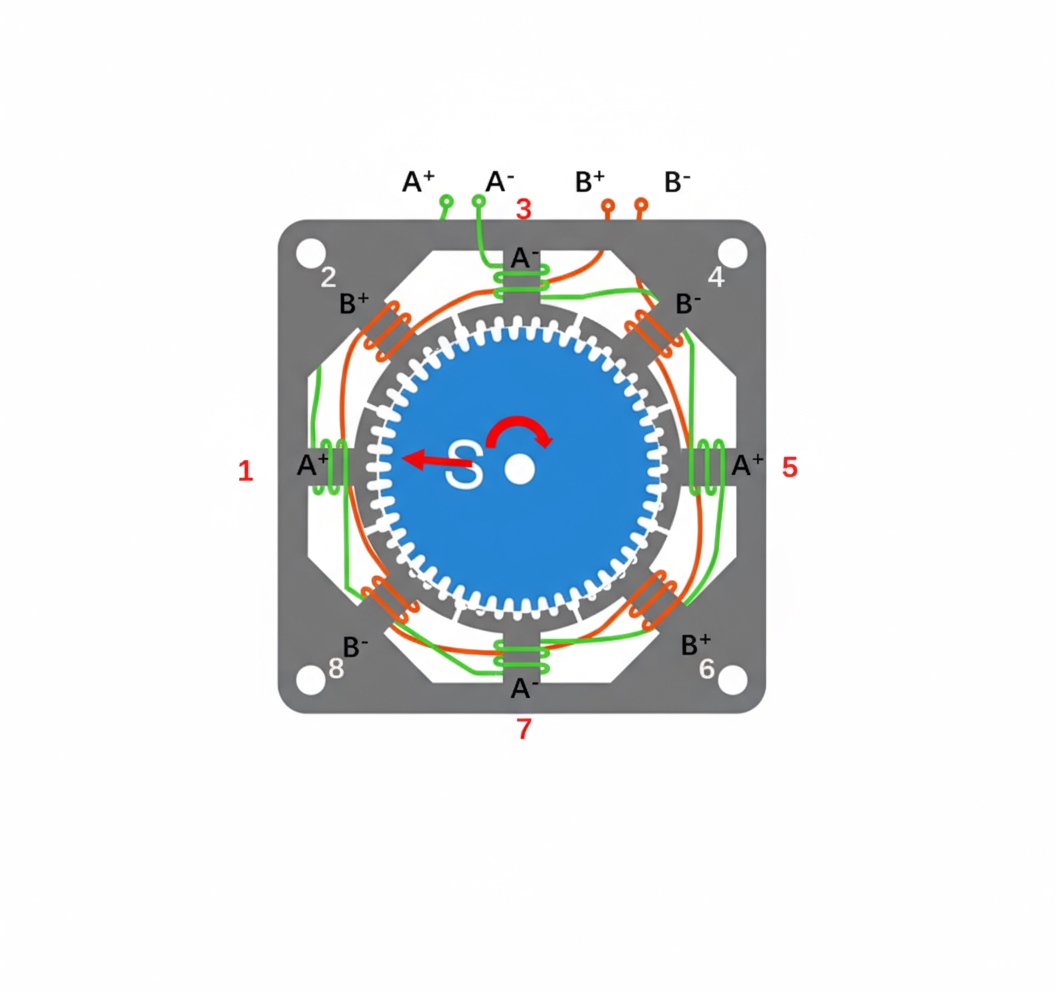
Technical overview of a 42-type stepper motor: construction, 1.8° step/full- and half-step driving, wiring, L298N driver specs, and 8051-based control code
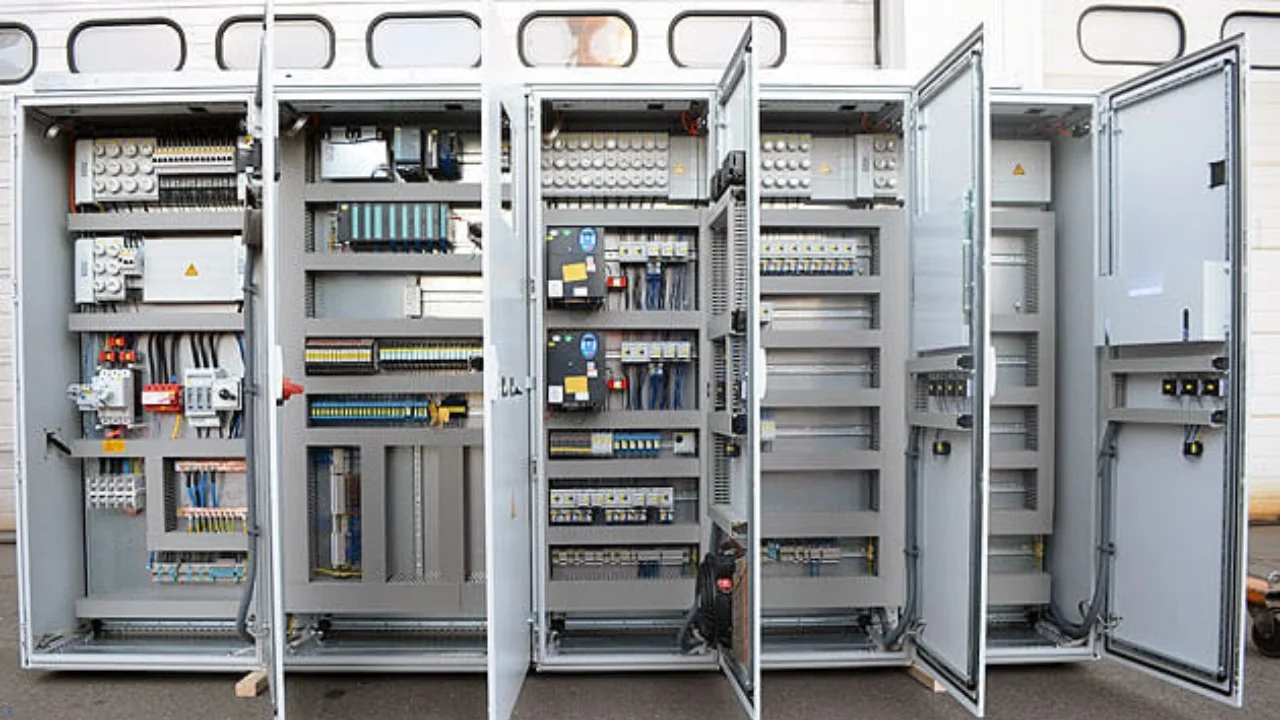
Technical overview of PLC control cabinet components, operating conditions, architecture, and working principle, including I/O image table and scan cycle behavior for automation.

Explains industrial camera frame rate and its relation to exposure time, covering non?overlapped vs overlapped acquisition and a timing example for STC?A202A.
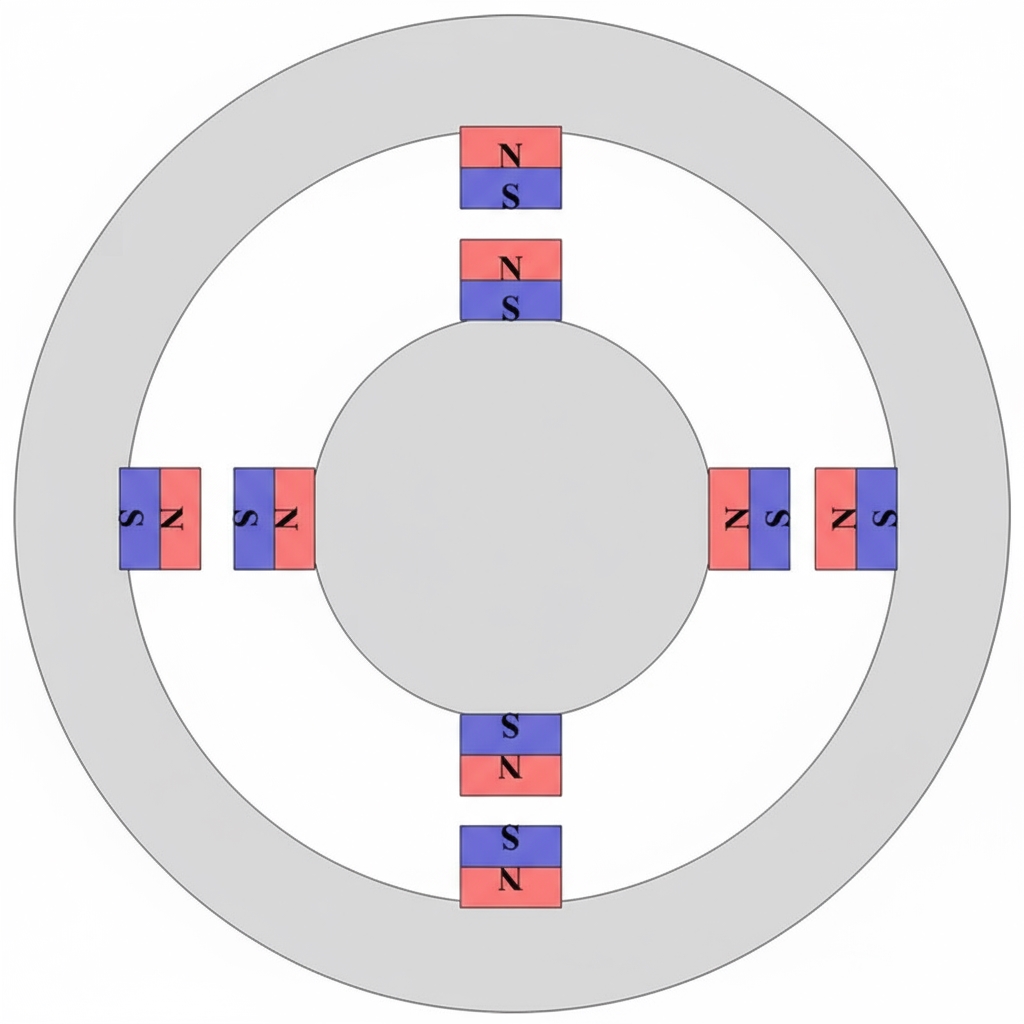
Explains basic motor model and torque from magnetic misalignment, introduces Park transform and DQ axes, and how field-oriented control (FOC) uses Id/Iq to regulate torque.
Automatic reciprocating control troubleshooting guide covering common faults, causes and remedies for limit switches, contactors, thermal relays, and phase-loss issues.

Compare MOSFET H-bridge and motor driver IC solutions for motor control, examining power capability, design complexity, and reliability trade-offs.
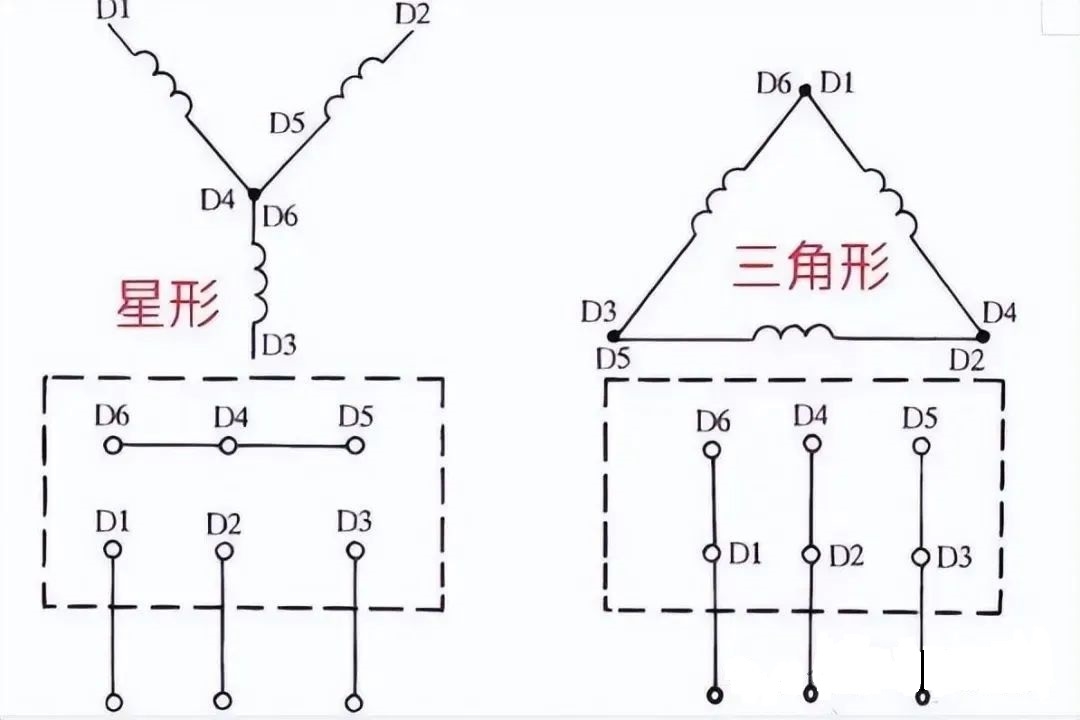
Explains motor wiring for three-phase motors, distinguishing star (Y) and delta (Δ) connections and identifying terminal marks: single horizontal for Y, three vertical for Δ.

Industrial PC installation and maintenance guide covering grounding, power and environmental controls, EMI avoidance, I/O procedures, backups, and temperature/humidity limits.
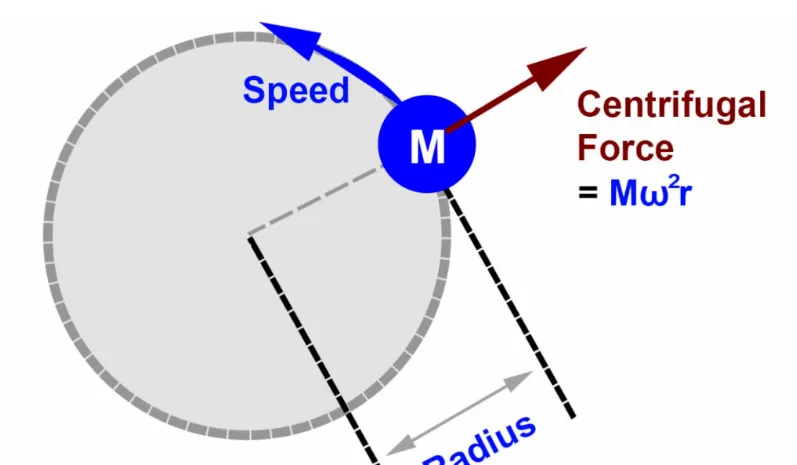
Assessing when carbon fiber winding is required for high-speed rotors vs ultra-high-strength electrical steel, rim-speed thresholds, manufacturing limits and industry suppliers.
Comparative overview of single-motor vs dual-motor drive systems in new energy vehicles, assessing load distribution, architectures, and durability implications.

FANUC 0i/0TD CNC troubleshooting: handwheel pulse generator failure, overtravel/ALM701 alarms, and maintenance parameter procedures for diagnostics and temporary fixes.