ALLPCB
ALLPCB


Overview
Electronic skin (e-skin) is an important environmental sensing component for robots and must be sensitive to various tactile signals, including stress, temperature, and humidity. Traditional solutions combine arrays of different sensor types to directly measure multiple physical parameters, which prevents cross-talk between signals. Achieving higher accuracy typically requires greater sensor density and a wider variety of sensor types, but complex fabrication and limited sensor options constrain e-skin applications.
An alternative is to generate and detect physical fields related to touch, such as stress fields, temperature fields, and magnetic fields. The spatiotemporal continuity of fields enables reconstruction of an entire field from limited samples, allowing more accurate predictions at lower cost. Previous work used optical methods to detect stress-field changes and infer object shape and hardness, but optical approaches are limited by camera size and rigidity, making them unsuitable for complex curved or flexible surfaces. Other studies have used the sensing material itself as a carrier for stress and temperature fields and then analyzed spatial distributions to classify tactile interactions, but these methods generally provide only coarse classifications rather than precise physical measurements.
Biological inspiration
Human skin converts external contact forces into deformations, producing internal stress fields that are precisely sensed by mechanoreceptors. This stress-field sensing places high demands on receptor design to maintain stable performance under large deformations and pressures. Meissner corpuscles, for example, are mechanoreceptors in the skin composed of nerve endings, Schwann cells, and connective tissue; their encapsulation enables stable operation even when the skin undergoes substantial deformation and pressure.
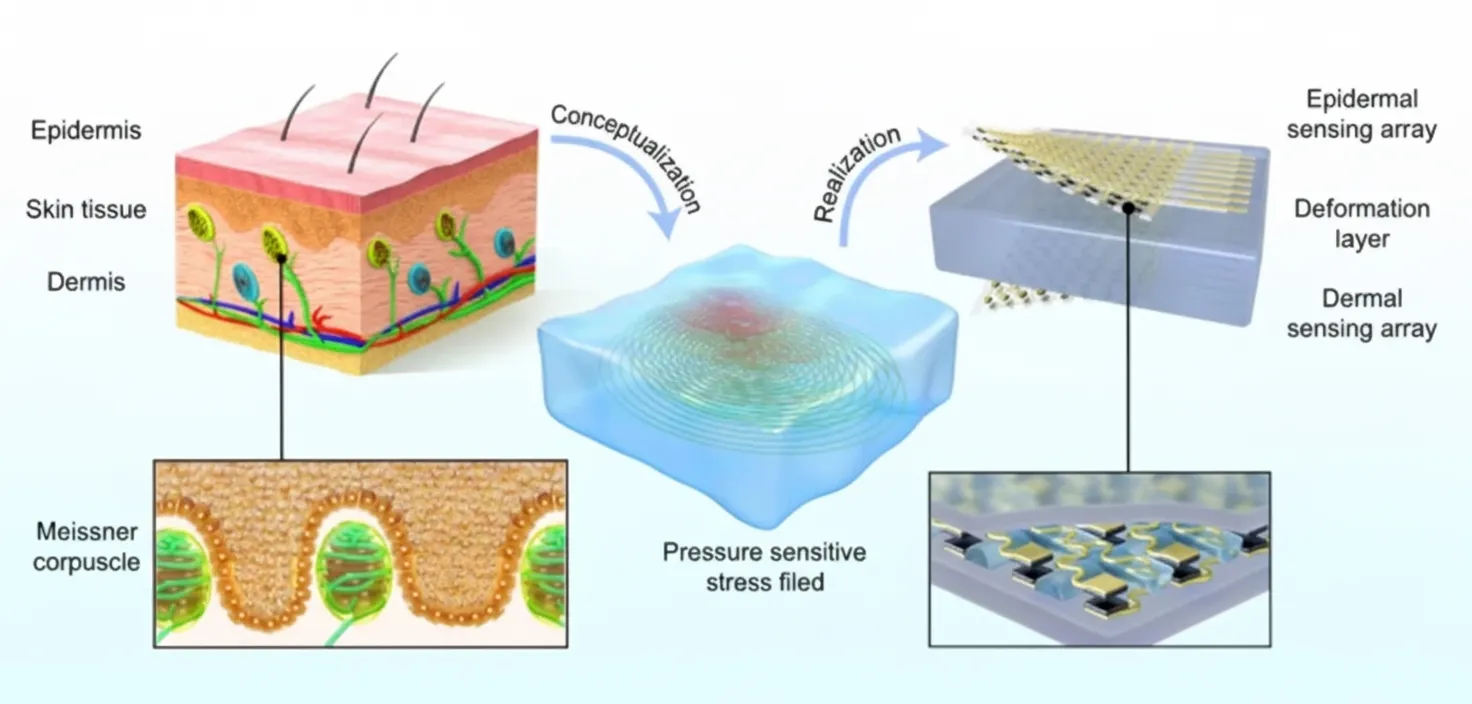
Figure 1 Meissner corpuscle structure, stress-field sensing, and biomimetic schematic
Biomimetic mechanoreceptor e-skin (BMRs)
Inspired by the mechanical sensing principles of human skin and the skin structure that supports stress-field sensing, researchers at the Soft Elastomeric Electronics and Nanosensor (SENS) Research Center, School of Physics and Optoelectronic Engineering, Shenzhen University designed a biomimetic mechanoreceptor (BMR) e-skin that reconstructs stress fields. The work was reported by MEMS Consulting and published as "Multi-parameter e-skin based on biomimetic mechanoreceptors and stress field sensing" in npj Flexible Electronics.
The BMR mimics skin architecture and consists of an "epidermis" sensing array, a "dermis" sensing array, and a skin-like deformation layer sandwiched between them. The deformation layer is an elastomer that serves as the stress-field carrier and deforms readily under external load. Both the epidermal and dermal sensor arrays contain pressure-sensing units that emulate Meissner corpuscle structures, sampling the stress-field distribution at the top and bottom of the deformation layer.
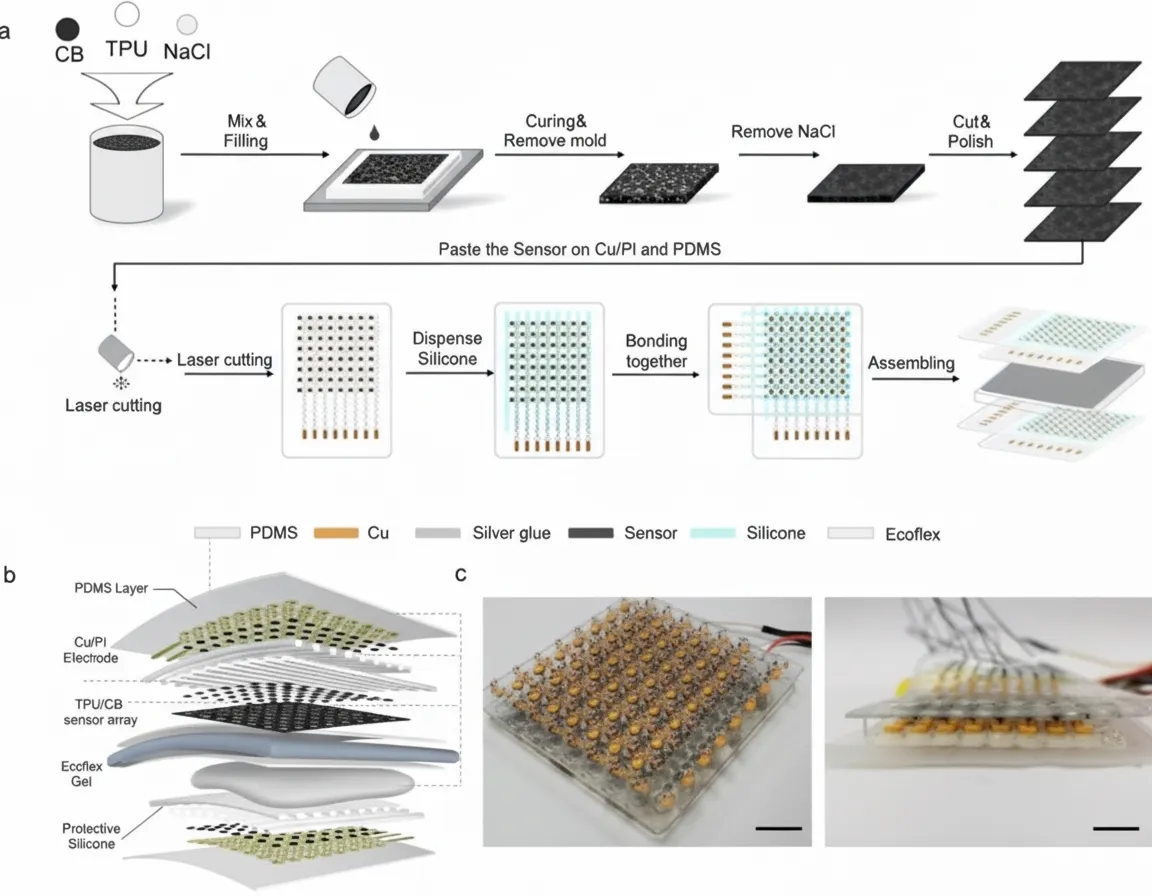
Figure 2 BMRs and component fabrication process
Capabilities
By reconstructing and analyzing the stress field, the BMR e-skin can precisely measure three-dimensional forces and distinguish objects of different hardness without integrating multiple separate sensors. Because stress-field variations are determined solely by external forces and are independent of sampling location, this e-skin can be fabricated with relatively simple methods and is readily integrated onto curved surfaces for practical tactile tasks.
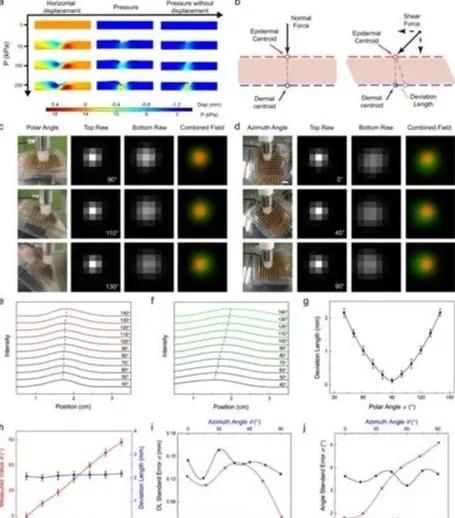
Figure 3 3D force detection based on stress-field sensing
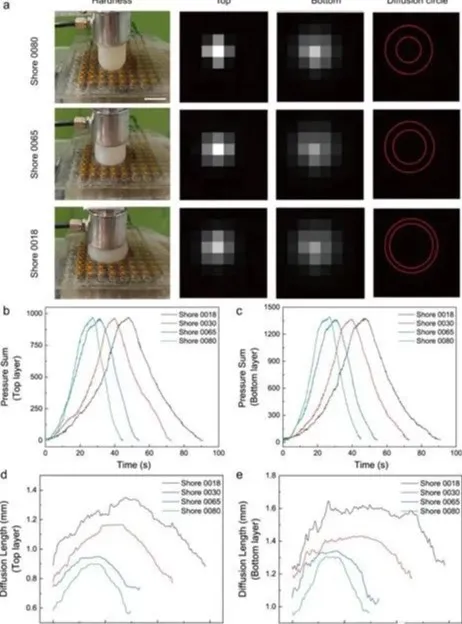
Figure 4 Measurement of object hardness
Modularity and applications
The stress-field sensing principle also supports modular design: each BMR component can be swapped according to sensing requirements. For example, a low-modulus gel deformation layer can be used for highly sensitive fingertip sensing, while a high-strength rubber deformation layer is suitable for robot joints that require high fatigue resistance. Sensor arrays can be chosen to match the required dynamic range. This modular approach provides a general and reliable solution for robotic tactile sensing.
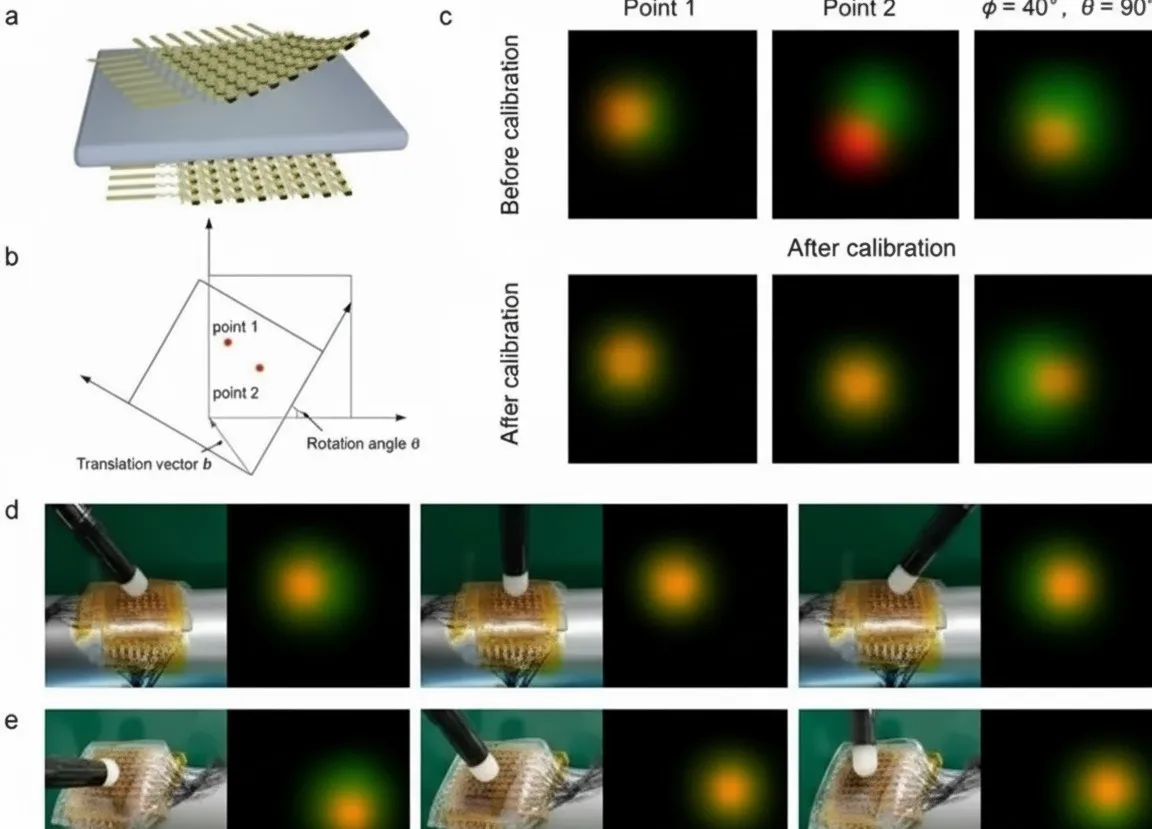
Figure 5 BMR modularity and demonstration on curved surfaces
Conclusion
Overall, stress-field sensing provides a strategy for extracting multi-parameter tactile signals from a simple e-skin architecture. The approach is robust and broadly applicable for tactile sensing tasks on flexible and curved surfaces.