ALLPCB
ALLPCB


Abstract
As PLC software standardizes and 5G networks develop, PLCs are shifting from dedicated control devices to software-based services, and industrial control is evolving from on-site solutions to pervasive, software-defined systems. This article proposes a 5G industrial control system built on a virtualized PLC (vPLC) foundation. It describes vPLC characteristics, architecture, and key technologies, and presents a vPLC implementation based on a 5G industrial gateway. Finally, it outlines vPLC development trends and analyzes technical challenges.
1. Introduction
Industrial control is a core part of manufacturing. Programmable logic controllers (PLC) are key devices in industrial automation, widely used across industry, transportation, and municipal sectors. PLCs evolved by integrating microelectronics, computing, control theory, and communication technologies to replace relays and other sequential control elements and to provide flexible programmable control systems. Traditional PLC hardware and control software are tightly coupled, and many mainstream products are from nonlocal vendors, leading to high cost and limited scalability.
2. Industrial control system evolution
With cross-disciplinary advances in control science, computing, information, and communications, control theory has progressed from classical feedback and modern control to data-driven intelligent control. Control systems have evolved from single-point and networked control toward distributed cloud-based control. The convergence of information and communication technology (ICT) with operational technology (OT) transforms traditional industrial control into new systems that are interconnected, scalable, and data-driven. Two major trends are apparent.
2.1 From closed, dedicated control to open, decoupled general-purpose architectures
Emerging technologies such as 5G and edge computing have driven industrial architectures from the traditional ISA-95 five-layer model toward a three-layer end-edge-cloud architecture. The PLC control layer is a focus: control tasks are migrating from embedded dedicated devices to general-purpose devices with real-time data processing capabilities. Soft real-time tasks such as logic control are tending toward edge or cloud centralization, while hard real-time tasks like motion control remain at the field side.
2.2 From single-task sequential processing to distributed multitask coordination
Traditional PLCs process tasks sequentially. As control scales expand, task volumes increase, task types diversify, priority differences grow, and coordination requirements rise. The introduction of big data and artificial intelligence makes efficient collaboration between legacy control tasks and IT data-driven tasks necessary, requiring traditional control systems to move from single-node processing to multi-node coordinated processing.
3. 5G Cloudified PLC technical paths
Driven by ICT and 5G network advances, cloudified PLC solutions address limitations of traditional PLCs. Based on where PLC control tasks are deployed, three cloudified PLC paths exist:
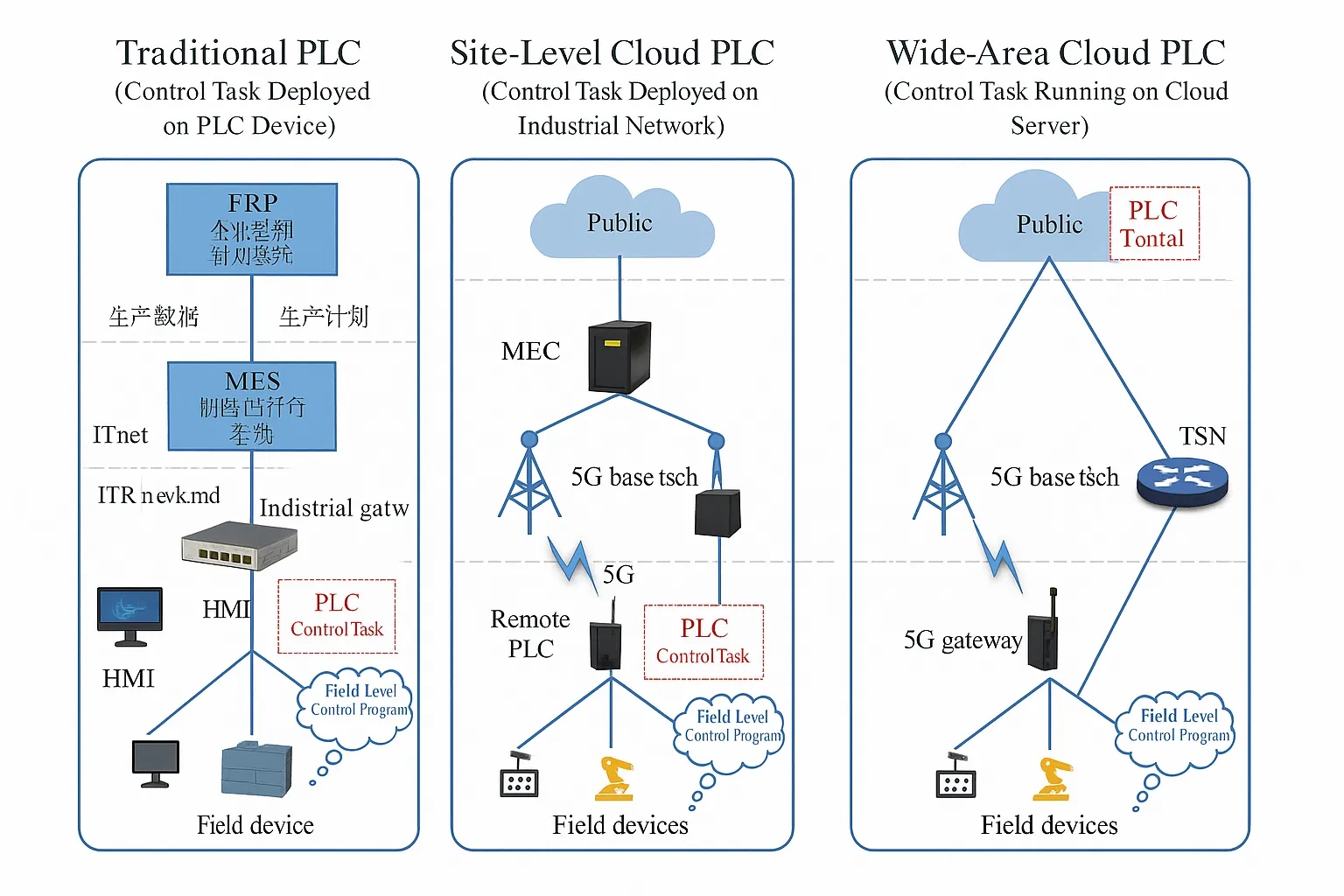
Figure 1 5G cloudified PLC development paths
(1) Field-level cloudified PLC: control tasks run on industrial gateways. Suitable for field-level medium- to high-speed control with control cycles of 1–5 ms or longer, providing high reliability and lower deployment cost.
(2) Edge-level cloudified PLC: tasks run on indoor baseband units (BBU), user plane functions (UPF), or multi-access edge computing (MEC). Suitable for workshop- or factory-level centralized control with control cycles of 20 ms or longer and relatively low deployment cost.
(3) Wide-area cloudified PLC: tasks run on central cloud servers. Suitable for factory-level low-speed collaborative control. With optical fiber and deterministic networking techniques, end-to-end latency can be reduced toward 5 ms, but deployment cost is higher.
Current 5G cloudified PLC approaches face issues such as nonuniform architectures, lack of support for end-edge coordination, and limited PLC application orchestration. In particular, 5G for industrial control must address latency, jitter, and reliability. To tackle these issues, this article proposes a 5G virtualized PLC architecture that achieves three unifications via end-edge-cloud coordination: unified runtime environment, unified deployment and scheduling, and a unified development and operations portal.
4. 5G virtualized PLC architecture
4.1 vPLC typical characteristics
Virtualization creates abstraction layers on hardware to partition resources into multiple virtual machines or containers, improving utilization and isolation. vPLC separates PLC control tasks from hardware by providing a virtualized runtime environment, enabling PLC tasks to run on various network elements. vPLC has three key characteristics:
(1) Software-hardware decoupling: vPLC provides an execution and scheduling environment that decouples PLC tasks from embedded real-time operating systems.
(2) Virtual runtime: using virtualization on general-purpose hardware allows heterogeneous operating systems to host the PLC runtime, decoupling PLC tasks from underlying hardware.
(3) Orchestration and scheduling: vPLC is essentially a software service that can be orchestrated and dynamically scheduled across end, edge, and cloud, offering flexibility and scalability beyond traditional PLCs.
Compared with traditional PLCs, vPLC improves flexibility and scalability, reduces equipment and maintenance cost, and facilitates production-line redesign.
4.2 vPLC as a unified technical foundation for 5G industrial control
A 5G industrial control system centers on vPLC and aims to provide a Control-as-a-Service (CaaS) open architecture in which PLC functions are ubiquitously deployable and reusable, enabling plug-and-control across heterogeneous networks. The architecture follows end-edge-cloud coordination and includes a runtime layer, service layer, and development layer:
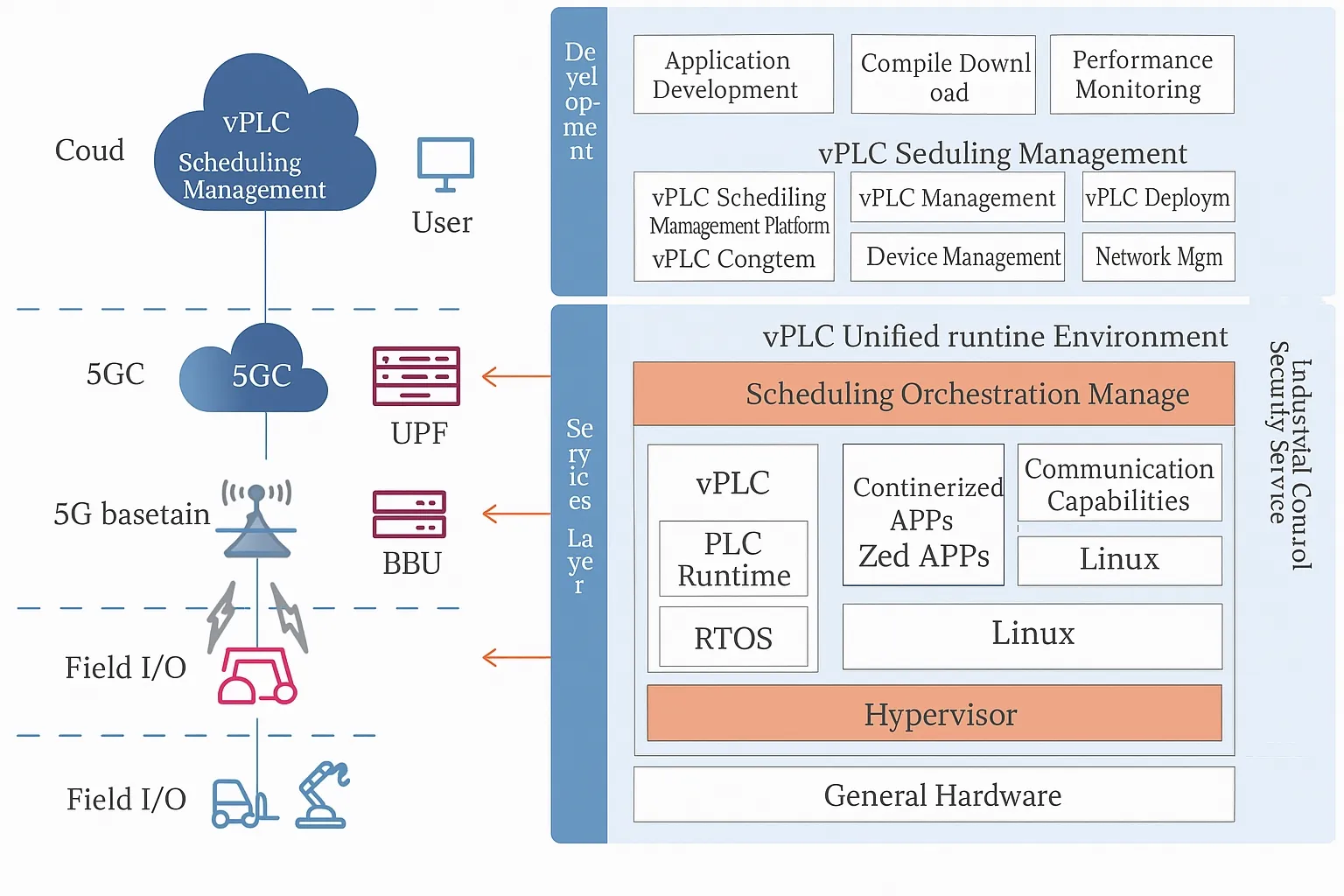
Figure 2 5G industrial control system architecture
(1) Runtime layer: provides a unified real-time runtime for vPLC on general-purpose hardware. Virtualization supports mixed deployment of real-time and non-real-time OSes and dynamic scaling of vPLC.
(2) Service layer: deploys vPLC to different physical nodes and manages their lifecycle, enabling unified deployment and scheduling of PLC services.
(3) Development layer: offers PLC application development, compilation, and debugging tools, and a unified development and operations portal.
The 5G industrial control system supports different cloudified PLC types within a single architecture. Edge-side vPLC ensures low-latency control for time-critical applications, while vPLC deployed across 5G network elements provides integrated connectivity, compute, and PLC capability, enabling a flatter industrial control model and reducing dependence on proprietary ecosystems. A general-purpose hardware and software approach can lower control system cost and advance software-defined industrial control.
5. Key technologies for 5G virtualized PLC
5.1 Real-time virtualization
PLC tasks run periodically as operating system processes and must receive external inputs and CPU time each cycle. Operating system real-time behavior is therefore critical. Real-time virtualization combines hardware and software virtualization on general-purpose hardware to host both real-time and non-real-time tasks together, consolidating workloads from multiple embedded devices onto a single platform while preserving real-time guarantees. This approach benefits from broad hardware support and rich application ecosystems of general-purpose OSes while reducing cost, size, and power.
Major virtualization approaches include hardware partitioning, full virtualization, para-virtualization, and OS-level virtualization. Three approaches suited for real-time virtualization are:
(1) Hardware partitioning: dedicates hardware partitions with independent OS instances. It offers near-bare-metal real-time performance but limits resource sharing and utilization, and requires preallocation of peripheral I/O.
(2) Real-time Linux containers: convert Linux into a real-time system via Preempt-RT or Xenomai, then use lightweight containers for isolation. This leverages Linux ecosystems and reduces porting cost. However, even modified Linux may not match RTOS jitter performance in motion-control scenarios.
(3) Microkernel virtualization: uses a microkernel as a Type-1 hypervisor to mix RTOS and general-purpose OS deployments. Microkernels have smaller footprints, lower overhead, and better isolation, supporting hardware virtualization with high real-time performance. Challenges include immature ecosystems and hardware adaptation complexity.
Edge and cloud vPLC deployments typically favor real-time Linux containers due to low modification cost and mature container orchestration and redundancy technologies. End-side vPLC, with higher real-time demands, can use either real-time Linux containers or microkernel-based virtualization depending on requirements.
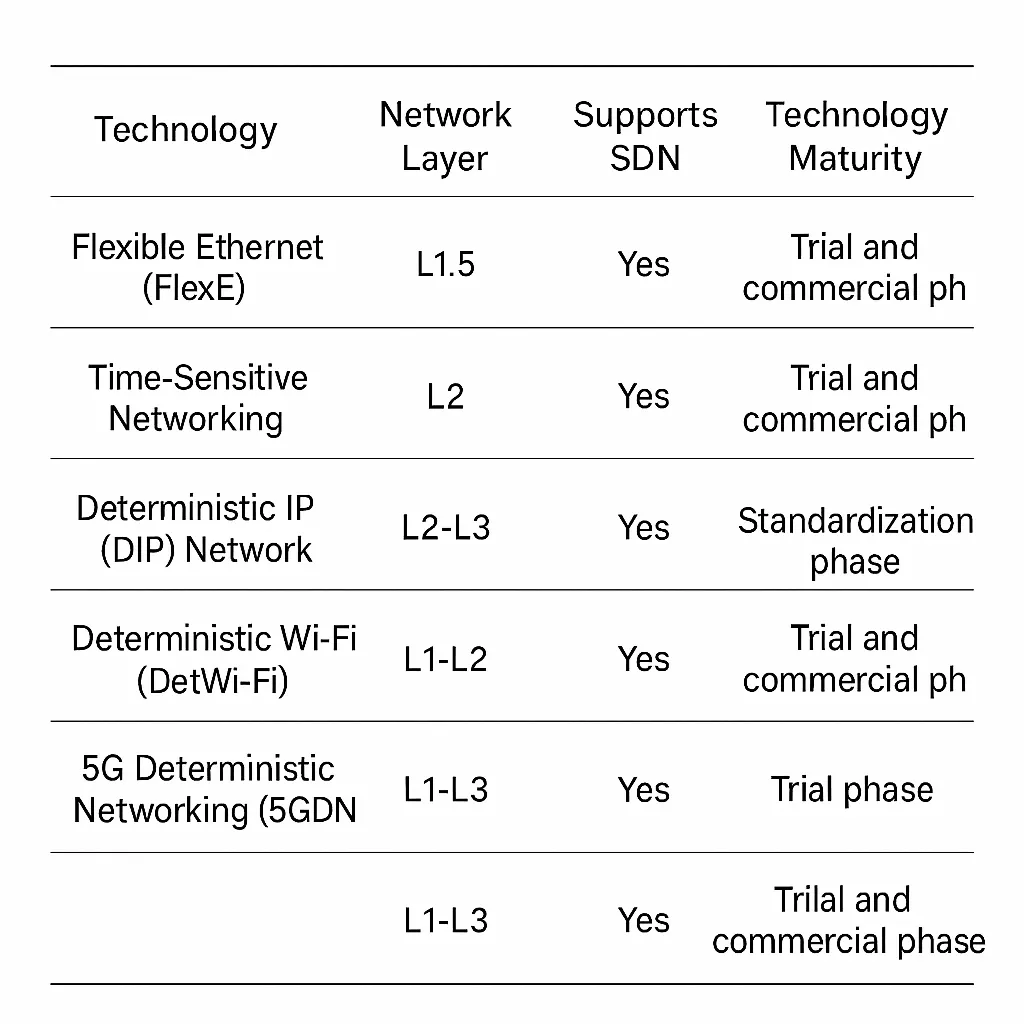
5.2 5G deterministic networking
5G industrial control imposes two primary network requirements: ultra-low air-interface latency for scenarios like motion control and inter-controller communication, and deterministic data delivery across heterogeneous networks to avoid network-induced jitter that destabilizes control loops. Deterministic networking technologies provide predictable service levels through precise clock synchronization, traffic shaping, and resource reservation. 5G Deterministic Networking (5GDN) leverages high-precision clock synchronization, traffic shaping, and resource reservation on top of 5G network slicing to provide deterministic bandwidth, latency, and high connection reliability (for example, 99.9999%), enabling predictable, schedulable, and verifiable wireless network behavior. Combining 5G deterministic networking with on-site networks and edge computing can achieve end-to-end deterministic control.
5.3 End-edge-cloud coordinated orchestration
With real-time virtualization, traditional PLC hardware becomes software services. A unified vPLC orchestration and scheduling platform is required to flexibly deploy PLC software across the end-edge-cloud continuum.
vPLC orchestration should deploy vPLC instances as containers or VMs on 5G industrial gateways, 5G industrial base stations, UPF, and MEC. Orchestration covers controller-to-IO (C2IO) and controller-to-controller (C2C) connectivity. C2IO covers PLC-to-IO communications for master and slave PLCs. C2C covers PLC-to-PLC interactions, typically a master PLC controlling slave PLCs. Typical deployments place production control systems and enterprise software in the cloud; edge nodes host master PLCs that issue commands to slave PLCs on the field side, while field-side slave PLCs handle IO interactions.
Unlike general-purpose orchestrators such as Kubernetes or KubeVirt, vPLC orchestration must prioritize real-time and reliability over elasticity. Redundant hot-standby vPLC instances are central to the orchestration model.
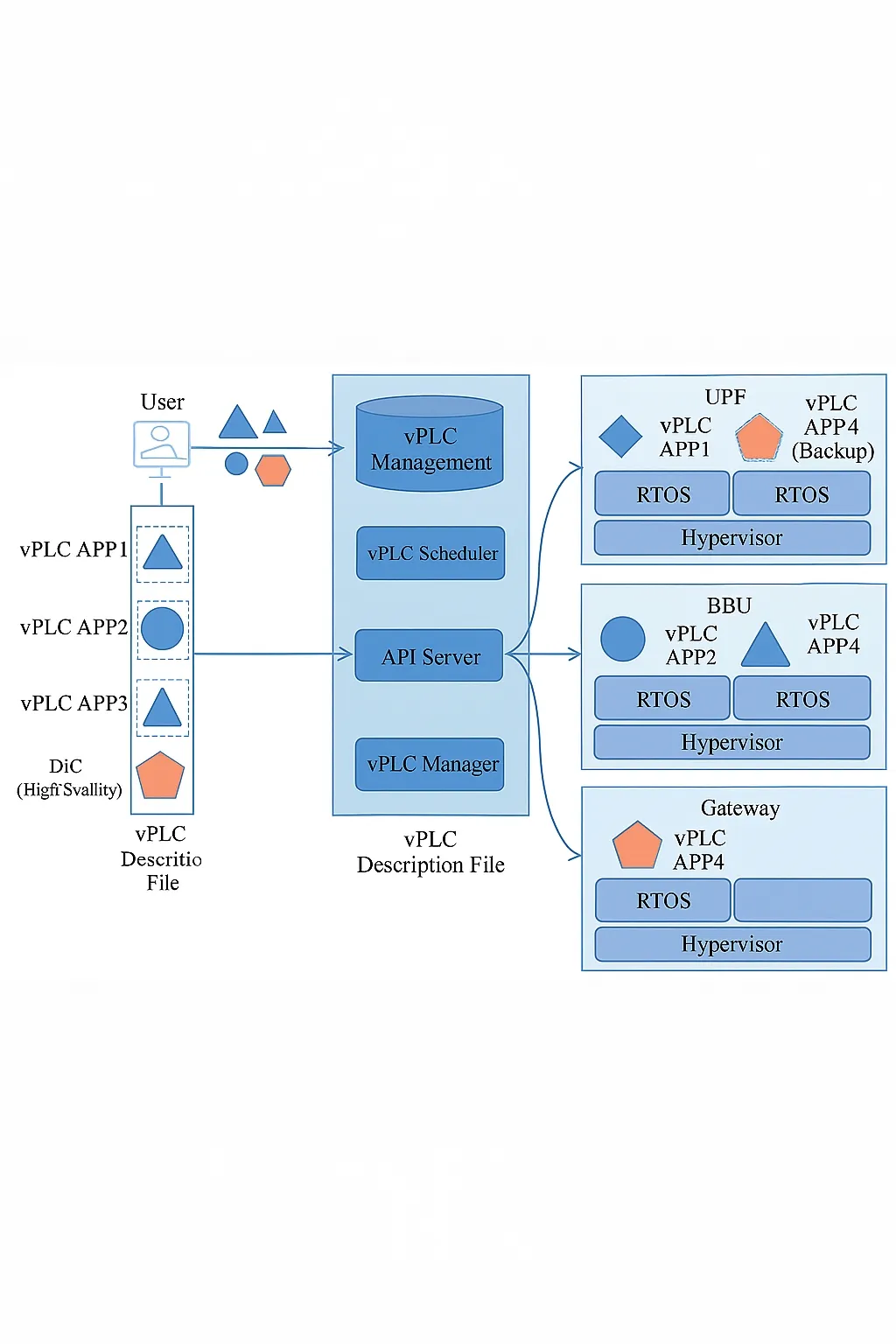
Figure 3 5G vPLC orchestration and scheduling model
6. vPLC implementation and field trial
6.1 Trial scenario and architecture
China Mobile, together with industry partners, has carried out vPLC technical trials and validated applications in over ten industrial sites. In one typical deployment, a 5G network was installed in a production workshop to provide connectivity for automated guided vehicles (AGV) used for material handling. The business logic plans AGV routes between storage and production stations based on material types.
For this scenario, a master-slave end-edge coordinated architecture was implemented. The master vPLC runs at the UPF on the edge, centralizing PLC deployment. The master vPLC receives tasks from the manufacturing execution system (MES), packages them into control commands, and sends them to the slave vPLC on the AGV. The master vPLC also receives execution feedback from the slave vPLC. On the field side, the slave vPLC runs on a 5G industrial gateway, replacing both PLC and 5G DTU functions. The slave vPLC controls AGV drive systems via sensors to achieve precise movement and positioning, and reports task completion back to the master vPLC.
6.2 System development
Real-time container technology was used to deploy vPLC instances on both the 5G UPF and the industrial gateway, transforming them into a 5G industrial UPF and a 5G industrial gateway. Key configuration is summarized in Table 2.
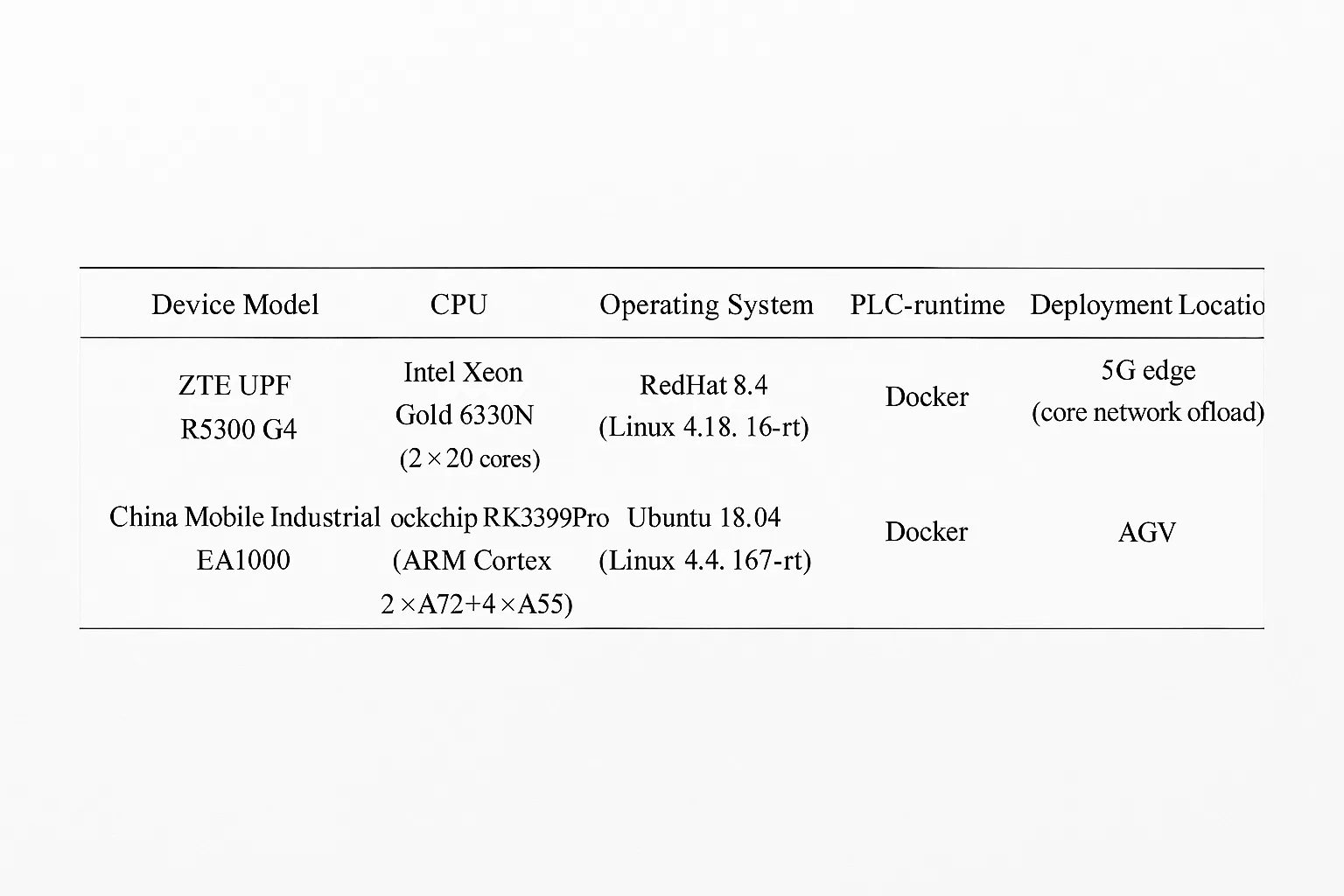
The system architecture comprises the 5G industrial UPF, the 5G industrial gateway, and the orchestration platform. Main development tasks included:
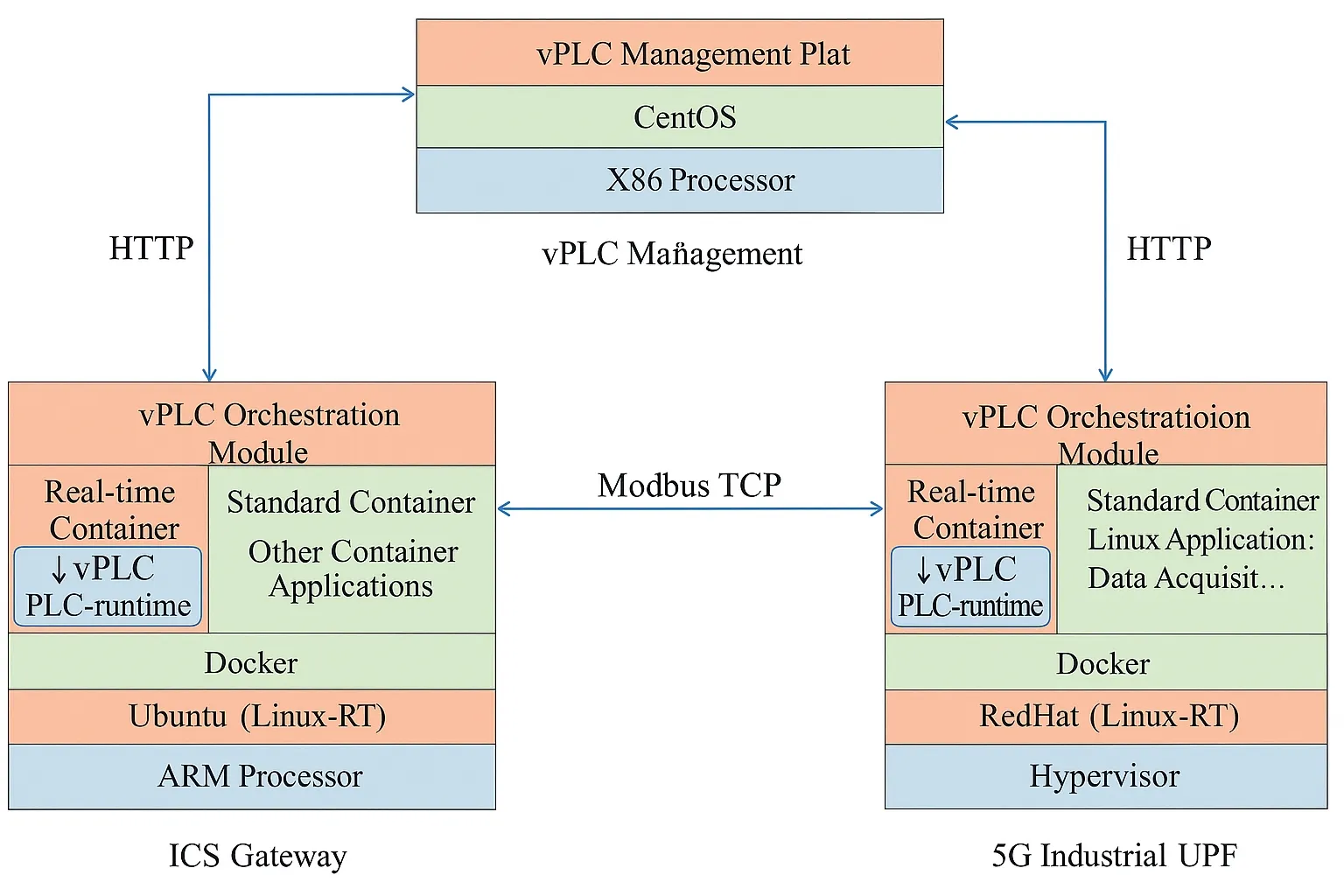
Figure 5 System technical architecture
(1) Linux kernel modification
Preempt-RT patches were applied to convert UPF and gateway kernels to real-time kernels (Linux 4.18.16-rt and Linux 4.4.167-rt). Under high load, maximum process latency dropped from 8 ms to 500 μs. CPU isolation was configured to pin real-time tasks to specific cores, reducing context-switch overhead and further reducing maximum jitter to under 300 μs. Interrupt routing was designed so device interrupts are handled on other cores to minimize interference with real-time tasks. After modifications, maximum process jitter was reduced below 100 μs.
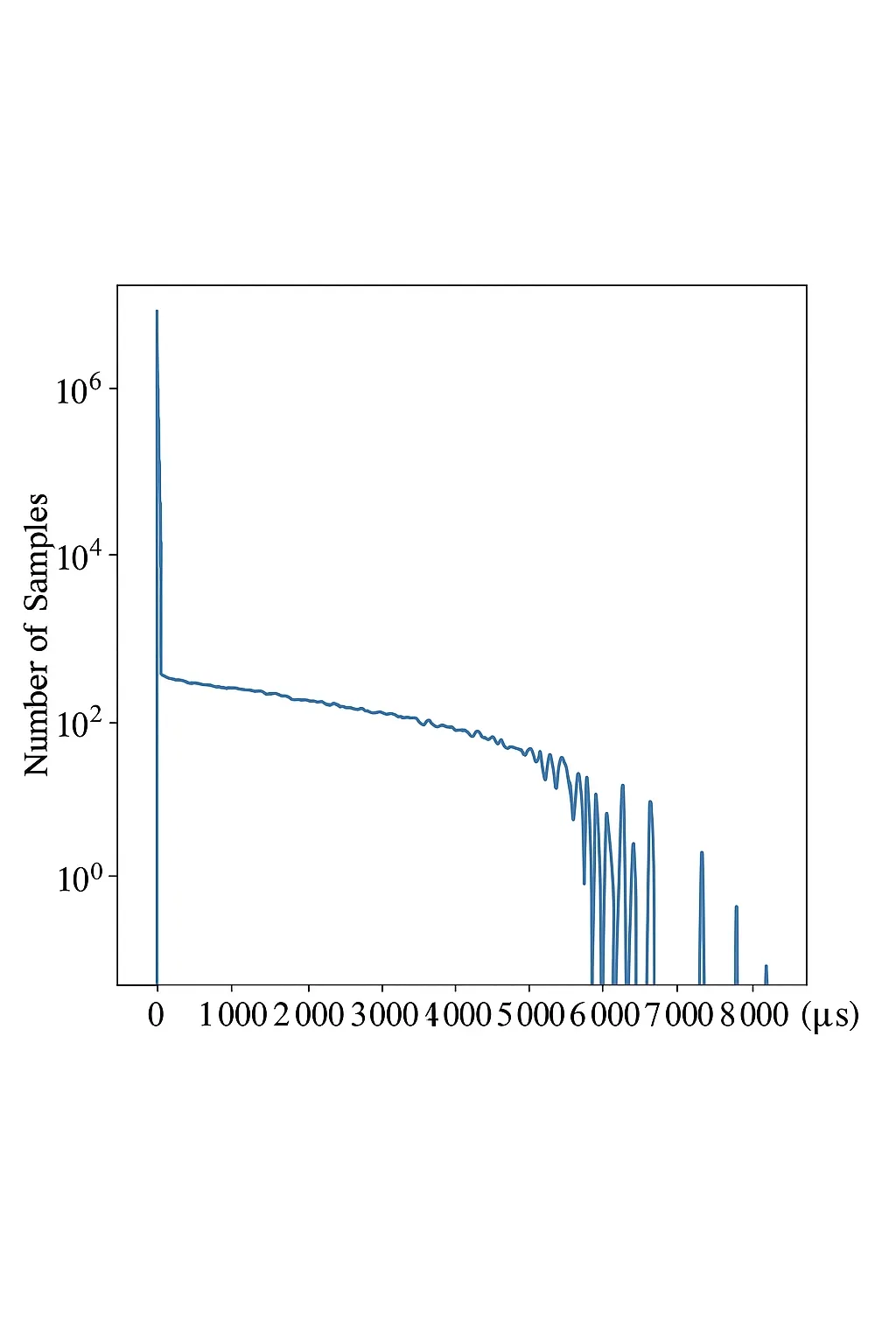
Figure 6 Process latency before Linux kernel modification
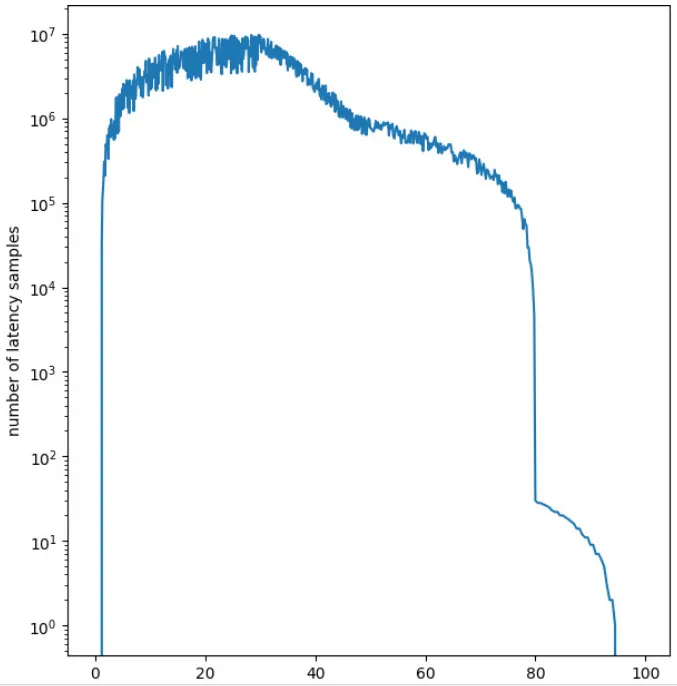
Figure 7 Process latency after Linux kernel modification
(2) PLC runtime containerization
A PLC container image was built on Alpine and integrated PLC runtime and 32/64-bit dynamic libraries. Two PLC runtimes were adapted. Persistent volumes were created for runtime data. Access to host peripherals such as RS232/485 and CAN was provided via device file mapping. For IP network interfaces, port mapping exposed interfaces required for PLC program download and external bus services such as Modbus TCP.
(3) vPLC orchestration
A lightweight browser-server orchestration system was developed to support unified orchestration across UPF and gateways and to reduce gateway resource usage. The backend has a management module and an orchestration module. The management module runs on a server providing web access, container image download, configuration, and monitoring. Orchestration modules run on UPF and gateways to pull images, configure environments, and manage containers. Modules communicate over HTTP. For example, orchestration modules poll the local Docker daemon via Docker Client to report container states to the management module, which handles exceptions. The vPLC orchestration UI is shown below.
6.3 Trial results
After deploying the 5G industrial UPF and gateway, the master vPLC and slave vPLC communicated with the slave vPLC and IO via Modbus TCP. The slave vPLC control cycle was set to 5 ms and the master vPLC control cycle to 20 ms, with the master performing a communication exchange with the slave once per cycle. Over a 14-day continuous test, AGV scheduling ran without stoppages or route deviations. Measured master vPLC average execution time was 457 μs, maximum 599 μs, and maximum jitter 532 μs. In industrial control, jitter is typically required to be within 10%–15% of the control cycle. Based on these measurements, the master-slave end-edge coordinated architecture can support control cycles of 5 ms or longer, meeting medium- to high-speed control requirements. Given current 5G air-interface latency remains above 5 ms in many deployments, the end-edge coordinated approach combines the benefits of centralized deployment and support for medium- to high-speed control compared with edge-only vPLC deployment.
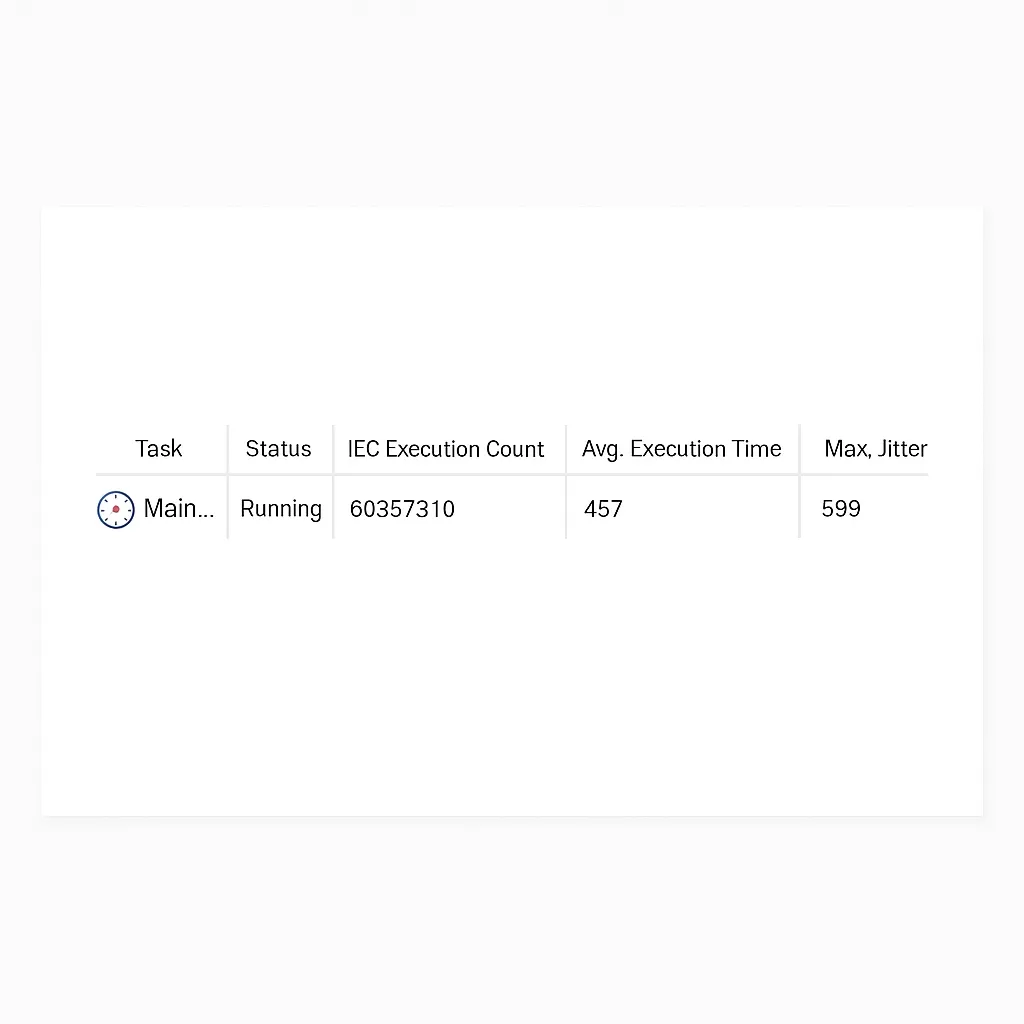
Figure 9 vPLC performance measurements
Compared with a traditional PLC solution that includes master PLCs, slave PLCs, and 5G DTUs, the 5G industrial control solution—consisting of 5G industrial UPF software and 5G industrial gateway hardware—reduces equipment procurement costs by more than 50%. Unified orchestration enables centralized remote deployment, updates, and maintenance of PLC applications, reducing operation and maintenance time by over 80%.
In summary, upgrading 5G network elements with software can provide PLC industrial control services without hardware changes or disruption to existing UPF or gateway services. The approach supports medium- to high-speed industrial control and offers lower cost, easier maintenance, and extensibility.
7. Conclusion
With the fourth industrial revolution, traditional PLCs are increasingly unable to meet industrial connectivity and control needs. Promoting ICT and OT integration and accelerating technical convergence can enable new 5G industrial control systems. vPLC offers a unified technical architecture and path for cloudified PLCs, and building a vPLC ecosystem can encourage PLC vendors to transition from hardware products to software services, creating space for domestic PLC technology development and reducing dependence on incumbent markets. 5G industrial control is still in early stages and requires joint industry efforts to advance microkernel virtualization, deterministic networking, redundant hot-standby mechanisms, and other key technologies. Collaboration with academia to cultivate interdisciplinary talent in industrial automation and information technology will support high-quality industrial control development.