ALLPCB
ALLPCB


01 Laser SLAM Overview
Laser-based simultaneous localization and mapping (simultaneous localization and mapping (SLAM)) requires a platform equipped with a laser scanner to estimate its pose while constructing a map of the surrounding environment. Accurate localization depends on an accurate map, and an accurate map depends on accurate localization: localization focuses on estimating the platform pose, while mapping focuses on reconstructing external surroundings.
02 Laser SLAM (2D) Framework
Depending on the optimization framework used, laser SLAM methods can be divided into two main categories: filter-based and graph-based approaches.
3.1 Filter-based Laser SLAM
In real environments, surrounding feature points help with localization and mapping, so occupancy grid maps often perform better than in simulation. The Hector-SLAM approach has drawbacks: it is sensitive to initial conditions and has limited ability to handle loop closure. Overall mapping accuracy of Hector-SLAM is higher than that of Gmapping, but it requires more careful parameter tuning. Hector-SLAM is suitable for scenarios with higher map accuracy requirements, while Gmapping offers better ease of use.
3.2 Graph-based Laser SLAM
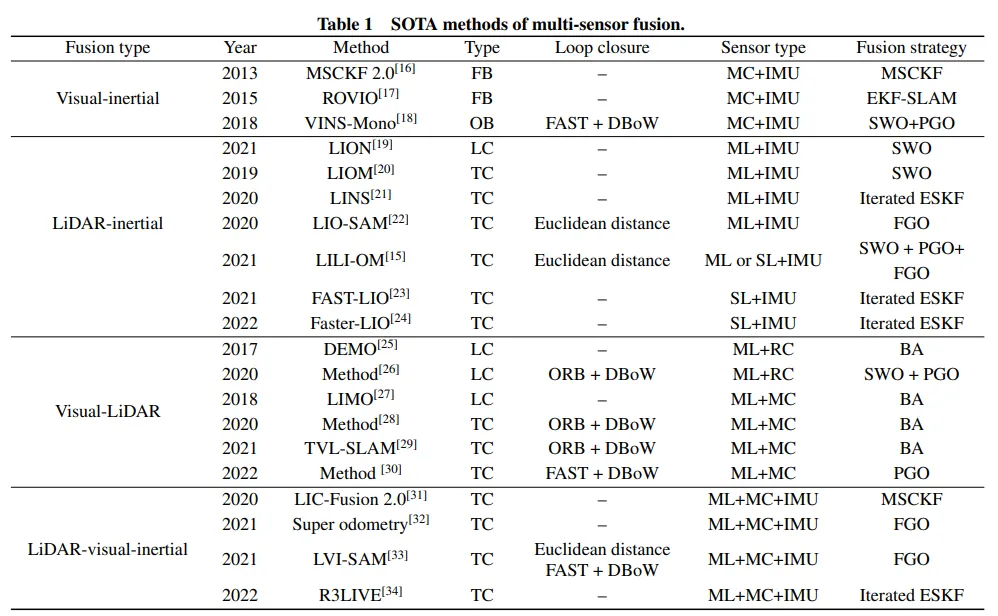
In 3D laser SLAM, the LOAM method proposed by Zhang J et al. uses 3D LiDAR data and feature-based scan matching, applying nonlinear optimization for motion estimation. The lidar odometry output is matched to the map using line and plane correspondences. LOAM lacks a loop closure module, and point-plane features can be unreliable in some cases.
Summary
Gmapping can build indoor maps in real time with relatively low computation and good accuracy for small scenes. Compared with Hector-SLAM, Gmapping has lower LiDAR frequency requirements and greater robustness (Hector-SLAM is prone to incorrect matching and map misalignment during rapid turns, mainly because its optimization can fall into local minima). Compared with Cartographer for small scenes, Gmapping uses fewer particles and does not perform loop closure, so its computational load is lower while accuracy remains comparable.