ALLPCB
ALLPCB


Summary
The research group led by Jun-Tian Qu at Tsinghua University Shenzhen International Graduate School published a review on tactile sensing technologies for flexible robotic hands. The paper systematically surveys different tactile sensor types, sensing modalities and methods, summarizes characteristics and system integration approaches for tactile sensors on soft robotic hands, and reviews multi-scenario tactile perception applications. The review concludes with a discussion of current challenges and aims to guide future development of tactile perception for soft robotic hands and their applications.
Importance of Tactile Perception for Soft Robotic Hands
Tactile sensing is important for human-machine interaction. Distributed tactile sensors on soft robotic hands can provide multimodal perception in unstructured environments, such as contact state (steady contact, sliding, torsion), surface features (roughness, texture, curvature), and physical properties (shape, weight, stiffness). These signals are critical for safe interaction between robots and environments or humans, and for dexterous manipulation. Soft robotic hands with tactile perception can improve intelligence, safety, and dexterity in manipulation tasks.
Tactile Sensor Types and System Integration
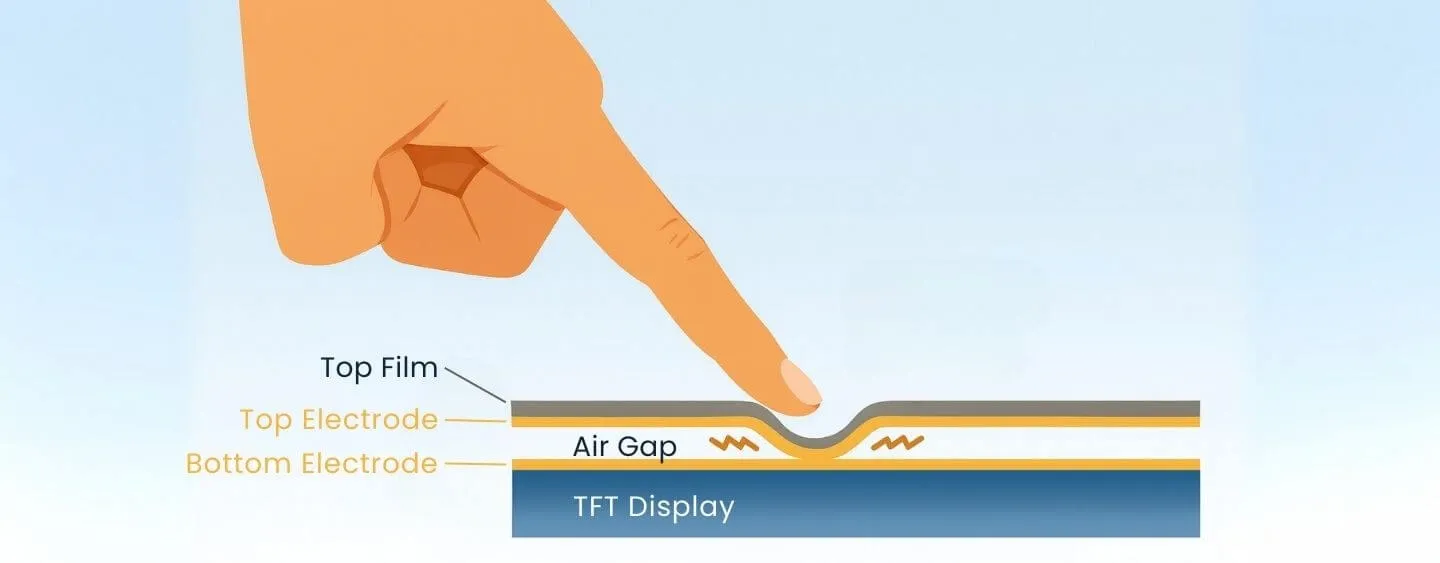
The review first describes sensing principles and structures of tactile sensors used in soft robotic hands (see Figure 2), including capacitive tactile sensors, piezoresistive tactile sensors, piezoelectric tactile sensors, vision-based tactile sensors, fiber Bragg grating tactile sensors, triboelectric tactile sensors, electromagnetic tactile sensors, and sensors based on smart textiles and fibers. The authors compare key performance metrics for representative tactile sensors, such as sensitivity, range, and resolution, and discuss advantages and disadvantages of each technology. Sensor system integration methods are also reviewed, including advanced tactile sensors for detecting various stimuli, data transmission, and power management.
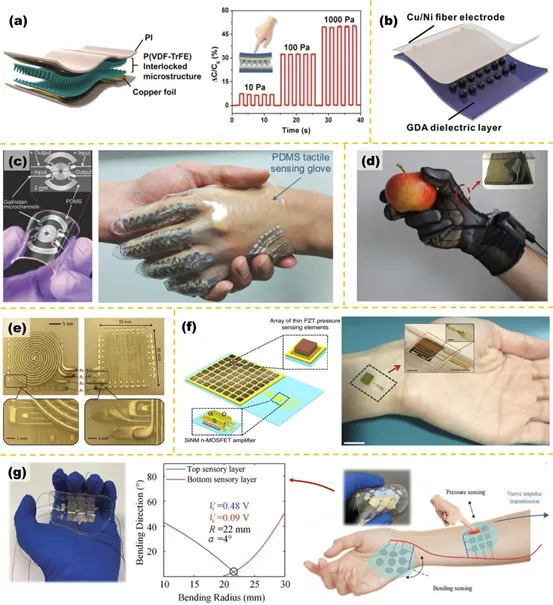
Figure 2: Capacitive, piezoresistive, and piezoelectric tactile sensors
Sensing Modalities
Compared with traditional rigid hands, soft robotic hands offer safer interaction with unstructured environments and greater deformability. To enhance perceptual intelligence, researchers integrate numerous tactile sensors to acquire information about grasped objects. The review examines four sensing aspects: force sensing, object property perception, sliding detection, and sensor fusion. It analyzes and compares typical machine learning methods used for tactile perception in soft grippers, including CNNs, DNNs, and SVMs. The authors also discuss special requirements for tactile sensing technologies in soft grippers.
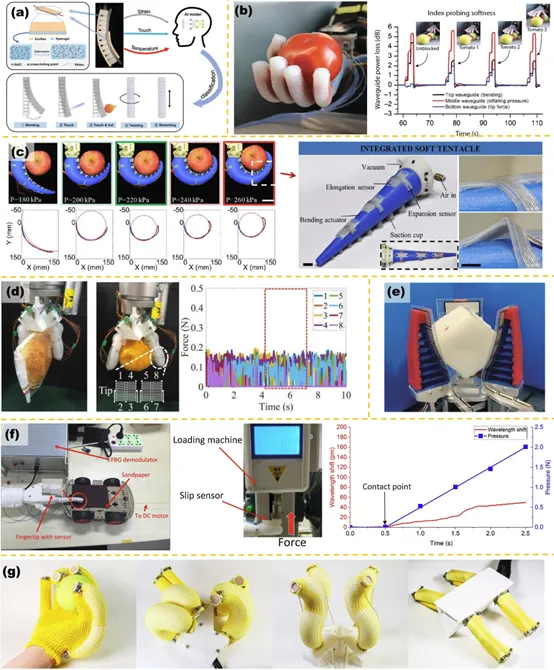
Figure 3: Applications of tactile sensing for object property perception
Applications
The review outlines application scenarios for soft robotic hands across underwater, medical, agricultural, and industrial domains. Examples include grasping live underwater organisms, neural prosthetics, fruit and vegetable harvesting and sorting, and goods handling.
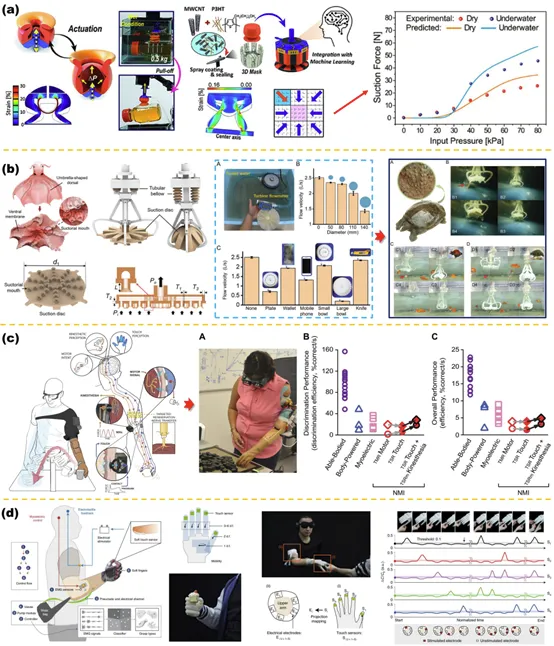
Figure 4: Tactile sensing soft robotic hands in underwater and medical applications
Challenges
The review surveys progress by researchers worldwide and identifies several remaining challenges:
- Advanced tactile sensor development. Current flexible tactile sensors suffer from limited durability and reliability, high complexity, poor compatibility, low flexibility, and short lifetime. Large-area pressure sensor arrays and multimodal tactile sensors that integrate multiple sensing functions are key trends for tactile sensor systems, but major breakthroughs are still needed.
- Algorithm effectiveness. Machine learning methods such as CNNs, DNNs, and SVMs are widely used for tactile data analysis. However, training time and computational cost are high, and generalization remains limited, reducing perception accuracy. Efficient algorithms are therefore crucial for processing tactile data from soft robotic hands.
- Lack of reliable control strategies. Most soft robotic hands remain at the sensing stage. To achieve safe, adaptive grasping, tactile feedback must be integrated into reliable closed-loop control strategies. Due to the properties of soft materials, these control schemes require fast response, high accuracy, and robustness to disturbances.
- Cost considerations. Reducing the cost of complex tactile sensing systems for soft grippers is important. Cost factors include sensors, hardware, control systems, and software.
Future Research Directions
To address these challenges, the review suggests several directions for further research:
- Structure. In addition to traditional microengineering innovations, draw inspiration from nature to design biomimetic microstructures for tactile sensing, such as mechanisms inspired by Venus flytrap trigger hairs or rodent whiskers.
- Materials. Explore non-polymeric materials or design additional free-volume spaces to reduce polymer chain deformation and improve sensor response speed, addressing viscoelastic hysteresis. Develop new soft materials with improved biocompatibility, life-like behavior, and fatigue resistance suitable for artificial muscles.
- Manufacturing methods. Advance additive manufacturing techniques with multi-parameter control, such as variable-stiffness material printing and micro-nano multilayer structure printing.
- Algorithms and control. First, develop more efficient machine learning algorithms, potentially leveraging large models, to accurately process massive tactile datasets. Second, combine neural-network-based control with classical control methods to achieve precise operation of soft grippers.