ALLPCB
ALLPCB


Introduction
Infant incubators are used for preterm, low-birth-weight, critically ill, or developmentally impaired newborns in clinical care. They are essential medical devices in neonatal care. Because of these infants' special conditions, incubators require high control precision, stability, and safety. Most incubators on the market use the traditional PID algorithm. Conventional PID is widely used in process control and offers good stability and robustness, but it struggles with time-varying nonlinear systems. This article applies a fuzzy PID algorithm to incubator temperature control, improving the system's dynamic and steady-state characteristics.
1 Design of the Incubator Temperature Control System
This system uses microcontroller technology to perform servo control of incubator temperature and enters temperature control mode automatically on power-up. The temperature monitor is the core component, providing temperature setting and real-time temperature monitoring. The system block diagram is shown in Figure 1:
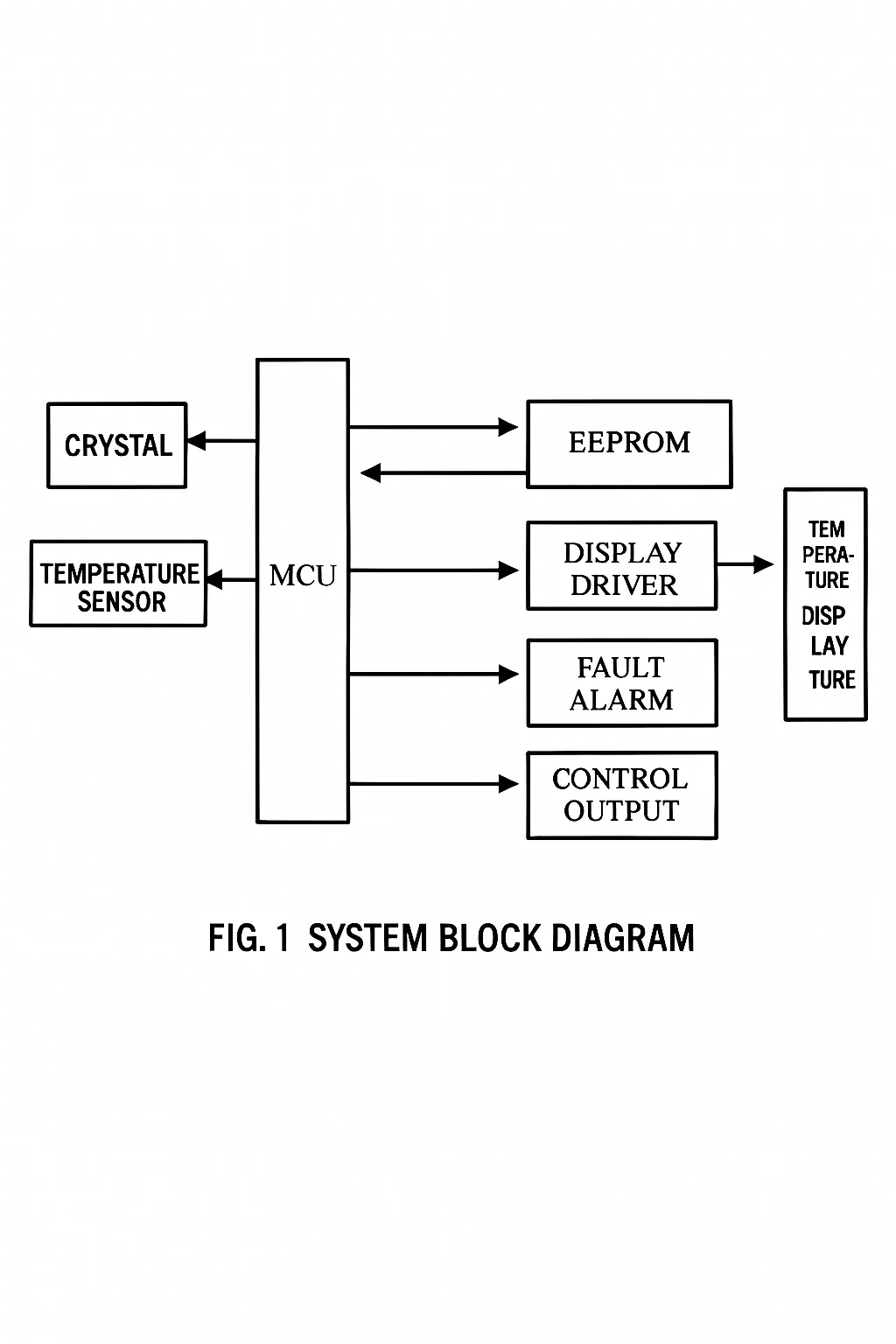
The air temperature inside the incubator exhibits delay. From the moment the measured temperature is below the setpoint until the heater begins to heat, the internal temperature continues to fall for a period. When heating stops, temperature does not immediately stop rising but continues to rise for some time before stabilizing. As a result, the incubator temperature tends to oscillate. Fuzzy adaptive PID control can effectively address these issues: the derivative term improves dynamic response, while the integral term reduces steady-state error.
2 Hardware Architecture
The system uses a 16-bit low-power MSP430 series microcontroller. The DS18B20 temperature sensor measures the incubator temperature and transmits it to a microcontroller I/O pin via a one-wire interface. Compared with traditional thermistors, the DS18B20 can directly provide temperature readings and can be programmed for 9 to 12 bit resolution; it completes 9-bit and 12-bit conversions in 93.75 ms and 750 ms, respectively. The temperature measurement is processed by the microcontroller using fuzzy adaptive PID computation, and the output control signal drives an optocoupler to isolate and amplify the signal, reducing interference. The amplified signal controls a triac to switch the heating element on and off. A keypad and an LCD provide temperature calibration, periodic temperature display, and high/low alarm setpoints. The circuit is shown in Figure 2:
3 Software Design
The software implements an adaptive fuzzy PID control method. Fuzzy control is based on fuzzy control theory, fuzzy language variables, and fuzzy logical inference. Combined with traditional PID, it forms an adaptive fuzzy control approach that adjusts PID parameters automatically through fuzzy inference.
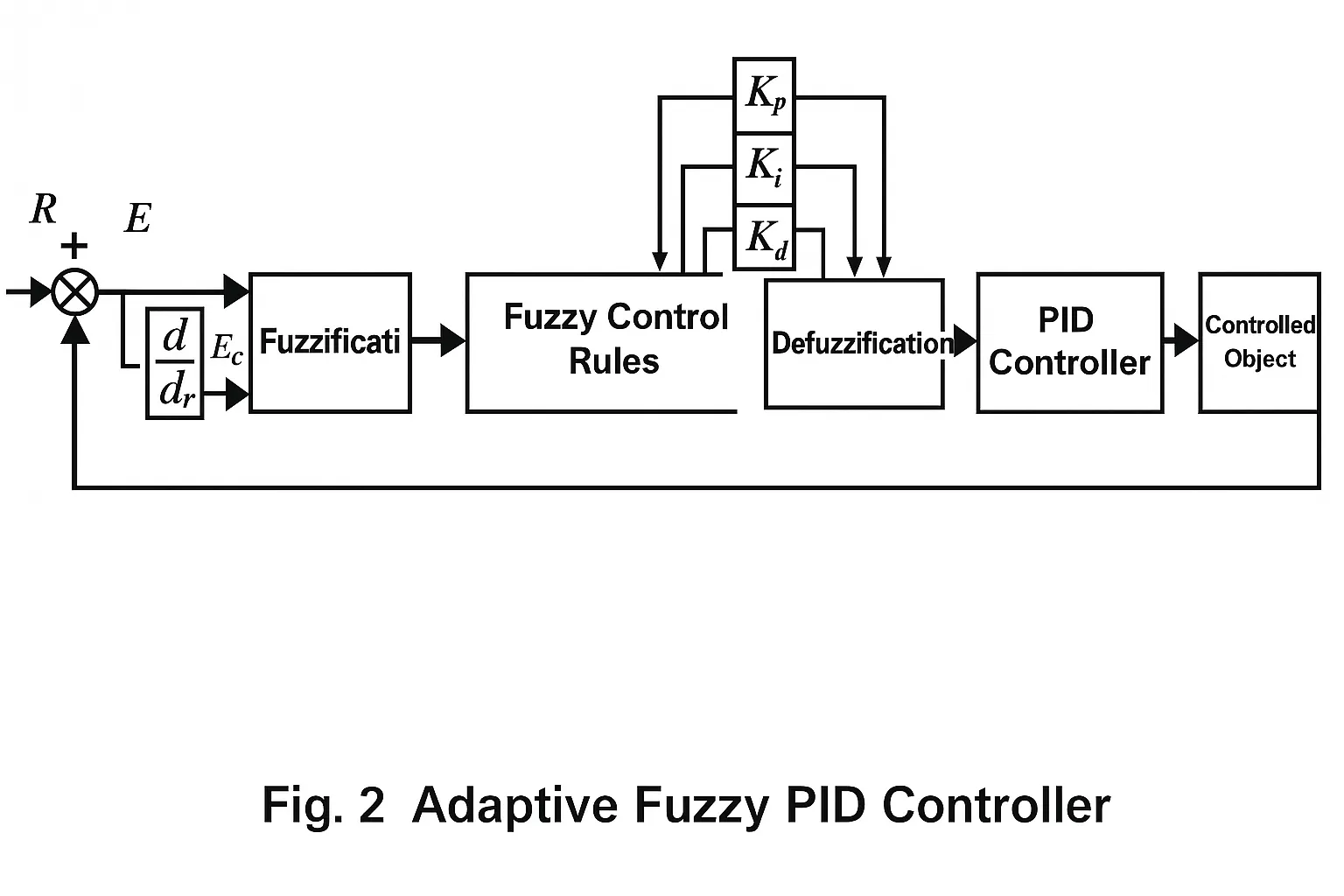
The adaptive fuzzy PID controller uses error E and error change Ec as inputs, allowing PID parameters to self-tune according to the current error and error rate. Fuzzy control rules are used online to modify the PID parameters, forming the adaptive fuzzy PID controller shown in Figure 3.
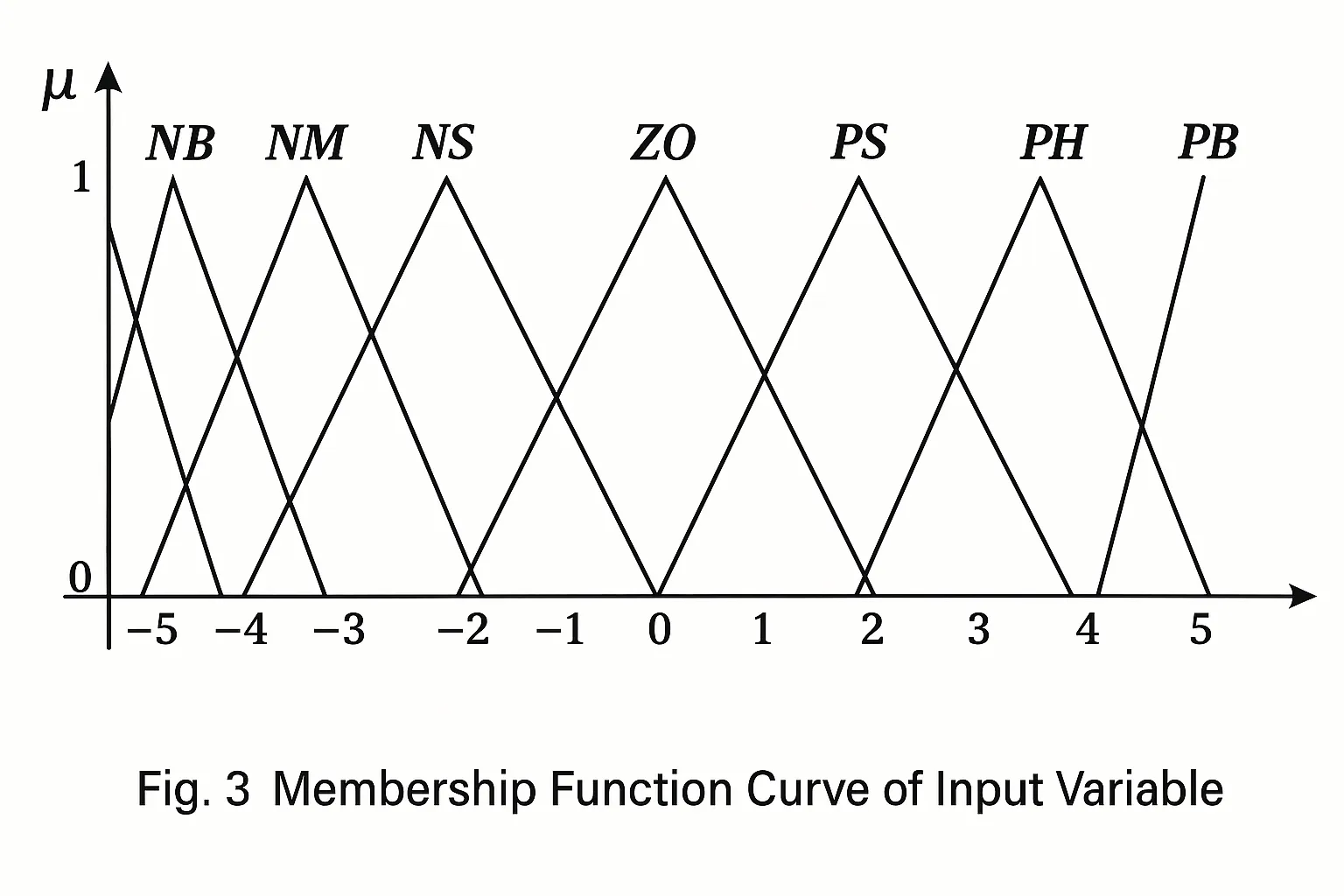
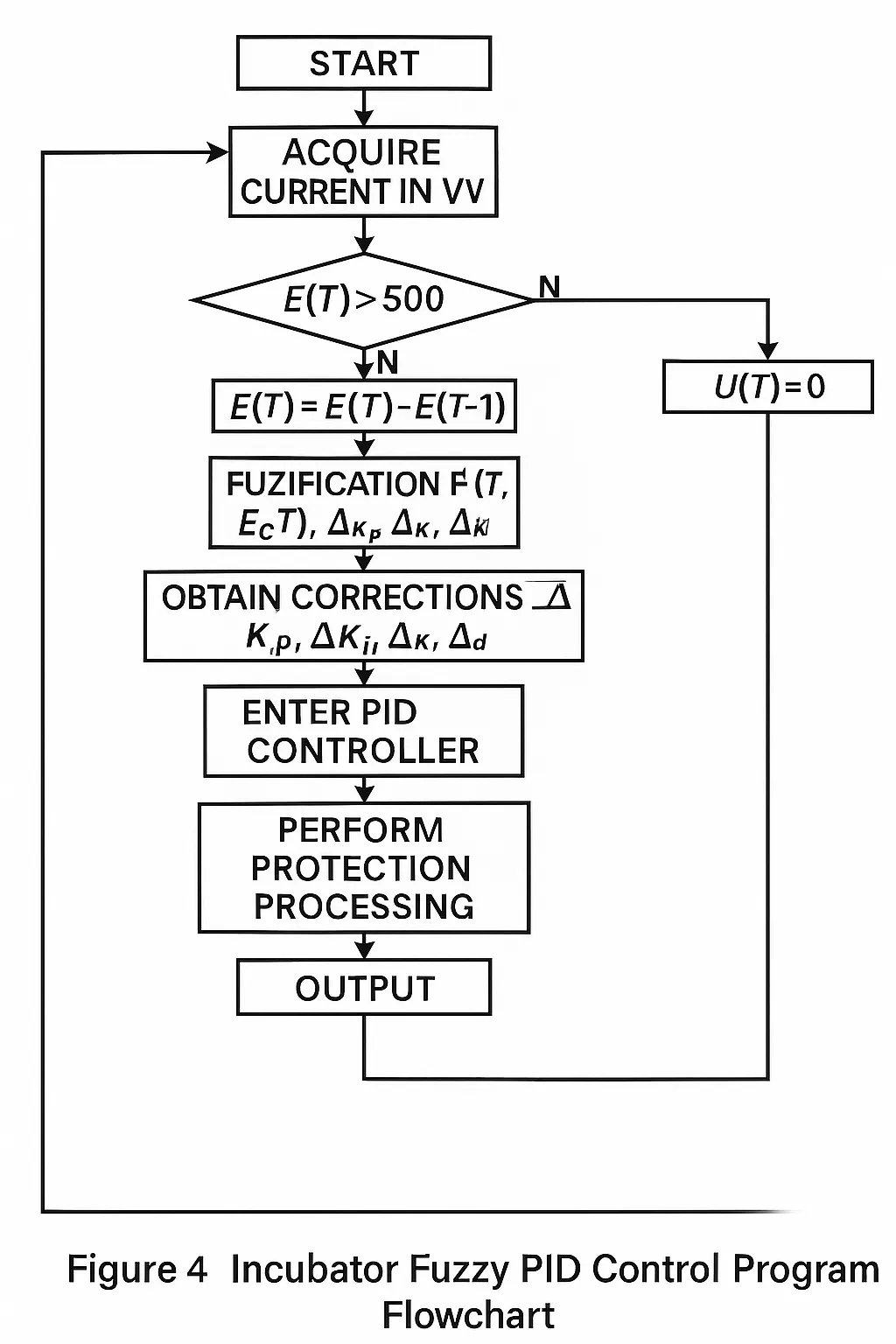
The input variables E and Ec are assigned fuzzy subsets {negative, negative-medium, negative-small, zero, positive-small, positive-medium, positive-big}, abbreviated {NB, NM, NS, ZO, PS, PM, PB}, and are quantified to the range (-5, 5). The membership function curves for the input variables are shown in Figure 4. Similarly, the output variables KP, KI, and KD use fuzzy subsets {ZO, PS, PM, PB}, quantified respectively to the ranges (0, 3), (0, 0.2), and (0, 0.8).