ALLPCB
ALLPCB


Wearable flexible electronics based on gesture recognition have applications in medical and health monitoring, robotics, human-machine interaction, and artificial intelligence. Developing high-performance flexible strain sensors is a fundamental requirement for advanced wearable devices. Sensor sensitivity determines perception accuracy, while mechanical robustness under overload, transient impact, and repeated bending or twisting affects long-term reliable operation in real-world conditions. Producing flexible strain sensing materials that simultaneously achieve high sensitivity and excellent mechanical robustness by facile methods remains challenging. Translating high-performance sensors from basic research into practical systems such as human-machine interfaces can provide new directions for device development.
Sensor concept and fabrication
A research team in the Film and Microscale Materials and Mechanical Properties group at the Institute of Metal Research, Shenyang National Research Center for Materials Science developed a flexible strain sensor that combines high sensitivity with strong mechanical robustness. Building on prior work on the mechanical behavior of metal films on flexible substrates and on sensing mechanics for flexible devices, the team introduced the sensing principle of crack-based sensors into a mechanically robust serpentine meander structure. By engineering high- and low-resistance regions within the sensing layer, they achieved high sensitivity comparable to crack-based sensors (gauge factor GF > 1000) while maintaining superior mechanical robustness. The sensor demonstrated excellent cyclic stability under overload, impact, underwater immersion, and high/low temperature conditions, maintaining stable response for up to 10,000 cycles. The device also exhibits fast response and recovery times (<58 ms) and low hysteresis.
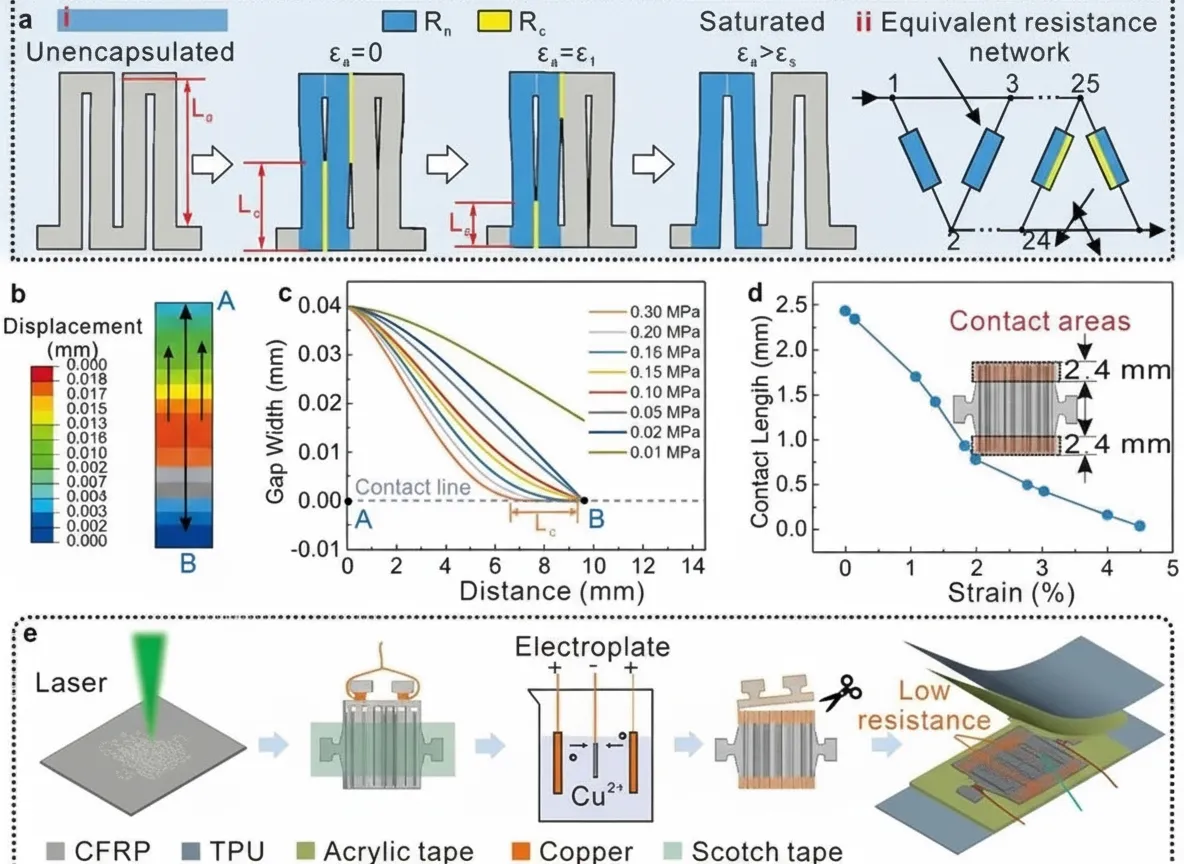
Figure 1 Design and fabrication of the flexible strain sensor. a. Sensing mechanism of the serpentine meander structure; b. Displacement cloud map of a sensing unit under surface shear stress; c. Distribution of gaps between adjacent meander traces across the sensor width under different surface shear stresses; d. Change in the contact-region length between adjacent meander traces as a function of strain; e. Schematic of the sensor fabrication process.
Sensing performance
The sensor's sensing performance was tuned by controlling the high- and low-resistance regions of the sensing layer. After region tuning, the device shows enhanced sensitivity and an extended detectable strain range. The sensor exhibits consistent cyclic responses under different peak strains and demonstrates short response and recovery times suitable for dynamic gesture detection.
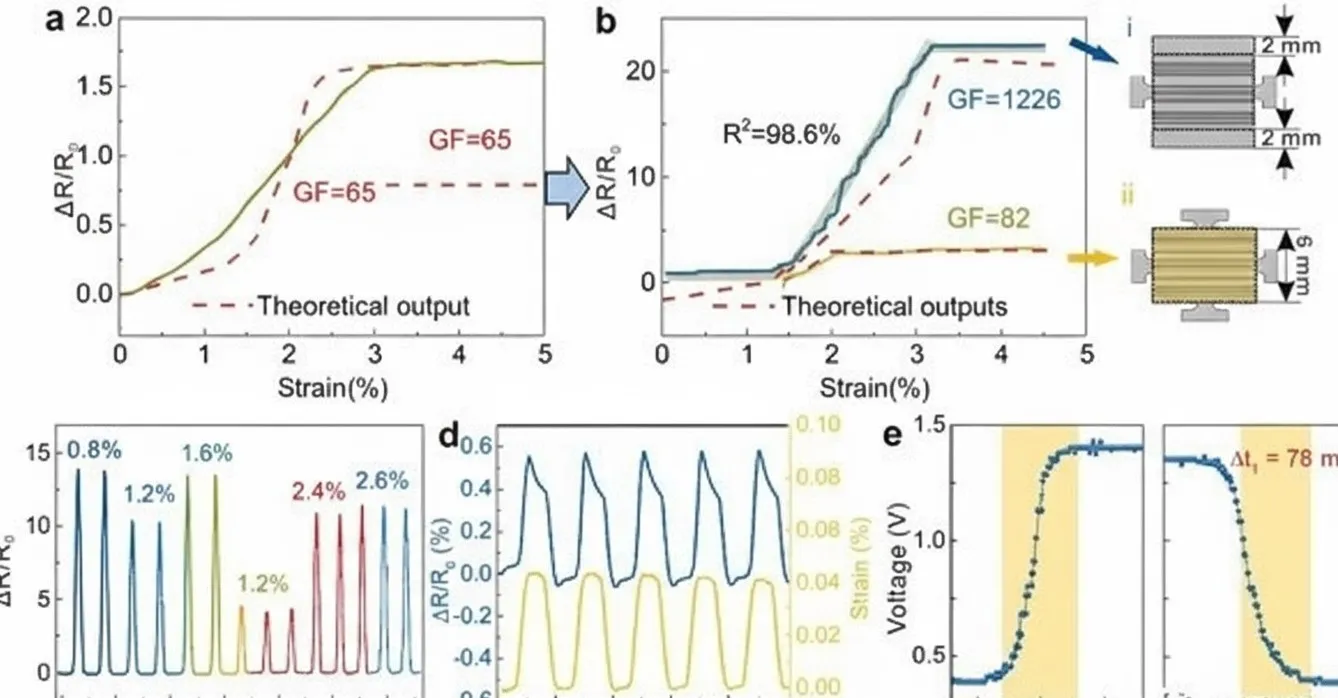
Figure 2 Sensing performance. a. Response curves before high/low resistance region control; b. Response curves after region control; c. Cyclic response under different peak strains and the sensor's detection limit; d. Response and recovery times.
Mechanical robustness
The device demonstrates high mechanical robustness. It maintains stable operation over long-term cycling and withstands large applied strains and harsh environmental conditions, including impacts and immersion tests, while preserving sensing performance.
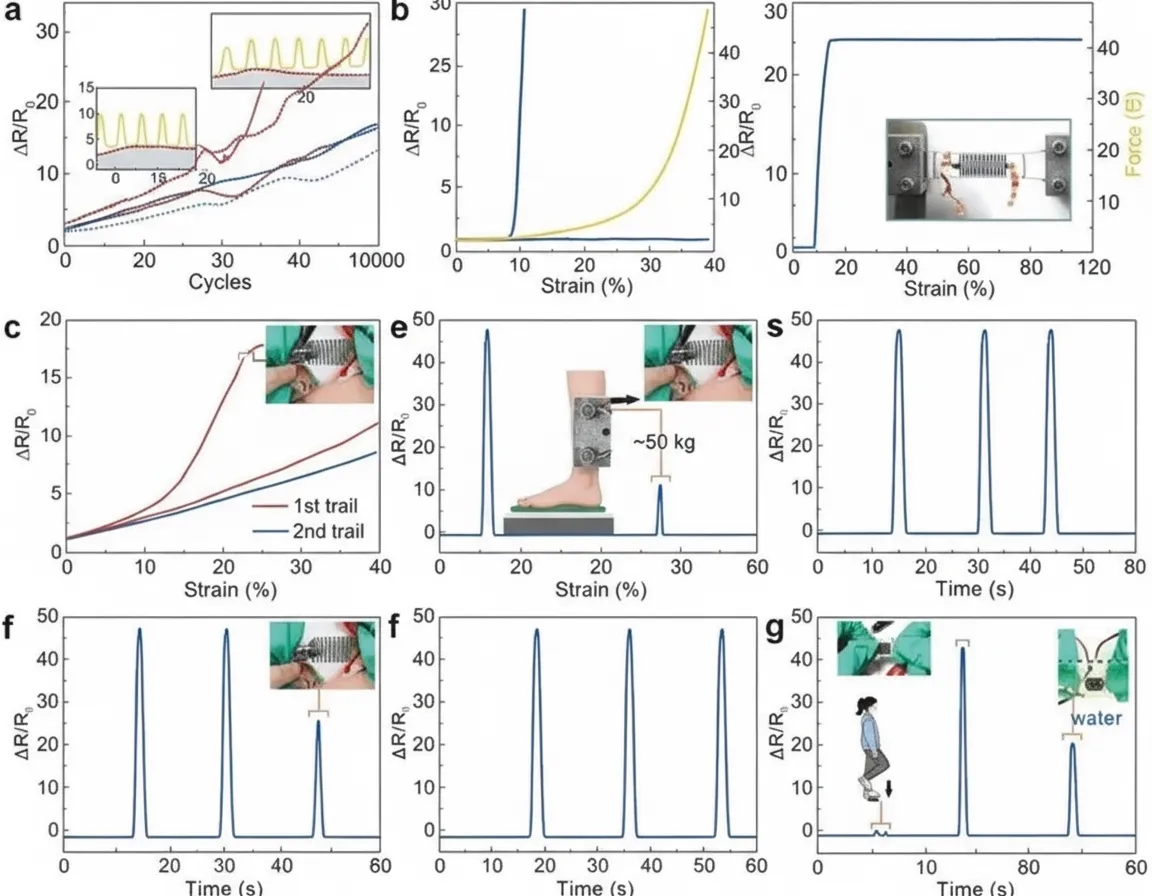
Figure 3 Mechanical robustness. a. Long-term cyclic stability; b. Maximum tolerable strain; c–e. Resistance to harsh environmental conditions.
Wearable sign language translation system
The team integrated the sensor into a custom wireless wearable human-machine interaction system and combined it with machine learning and user interface design to implement real-time sign language translation. The sensor's high sensitivity and fast response enable timely and accurate gesture perception, while its mechanical robustness supports long-term reliable operation in practical scenarios. Using machine learning classifiers, the system recognizes 15 single gestures and 6 composite gestures with accuracies of 98.2% and 98.9%, respectively. The overall system response time is under 1 s. The system translates sign language into spoken audio in real time and provides visualization of signal traces and translation results through a custom user interface. Further optimization of the circuit design and expansion of the gesture database could extend this gesture recognition approach to human-machine interaction, virtual reality, gesture authentication, intelligent sensing, and healthcare applications.
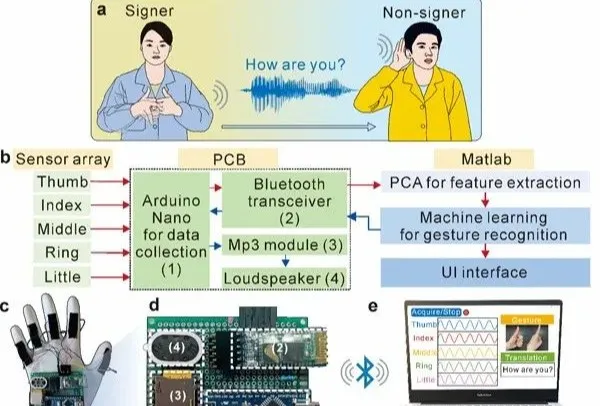
Figure 4 Wearable sign language translation system. a. Application scenario schematic; b. System architecture; c. sign language glove; d. wireless circuit board; e. user interface.
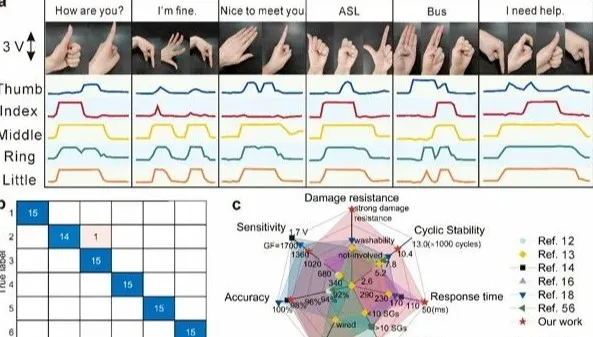
Figure 5 Sign language recognition validation. a. Six composite gestures used in validation; b. Recognition accuracy for the six gestures; c. Summary of system performance metrics.
Materials and broader applications
Based on long-term fundamental studies of microscale materials and the mechanical behavior of nanoscale metal layered composites, the team also developed nanoscale composite materials with extended service life for microelectromechanical systems (MEMS). These materials have potential applications in RF MEMS for aerospace, communications, navigation, and new energy sectors.
Publication and support
The results were published online in Advanced Functional Materials under the title "Ultra-Robust and Sensitive Flexible Strain Sensor for Real-Time and Wearable Sign Language Translation." The research was supported by the National Natural Science Foundation, the Institute's "Recruiting Outstanding Scholars" project, the Shenyang National Research Center youth talent program, and basic frontier and common key technology innovation projects. Researchers from Northeastern University participated in the study.