ALLPCB
ALLPCB


Motion capture systems follow two main technical routes: inertial and optical. Although inertial systems appeared after optical systems, their lower cost, simpler processing flow, and real-time calculation and feedback have led to widespread adoption. Representative products include the Xsens MVN from the Netherlands and the 3DSuit from the United States. In China there are companies such as Noitom and Guocheng Wantong.
Overview
How are inertial motion capture systems applied in virtual reality? This article summarizes the working principles, advantages, and disadvantages of inertial motion capture.
Principles of Inertial Motion Capture Systems
A typical motion capture system is composed of three parts: data acquisition devices, data transmission devices, and a data processing unit. Inertial motion capture applies inertial sensors at the data acquisition end. The data processing unit uses inertial navigation principles to process the collected signals and derive the measured orientation of the tracked object.
How is an inertial motion capture system implemented?
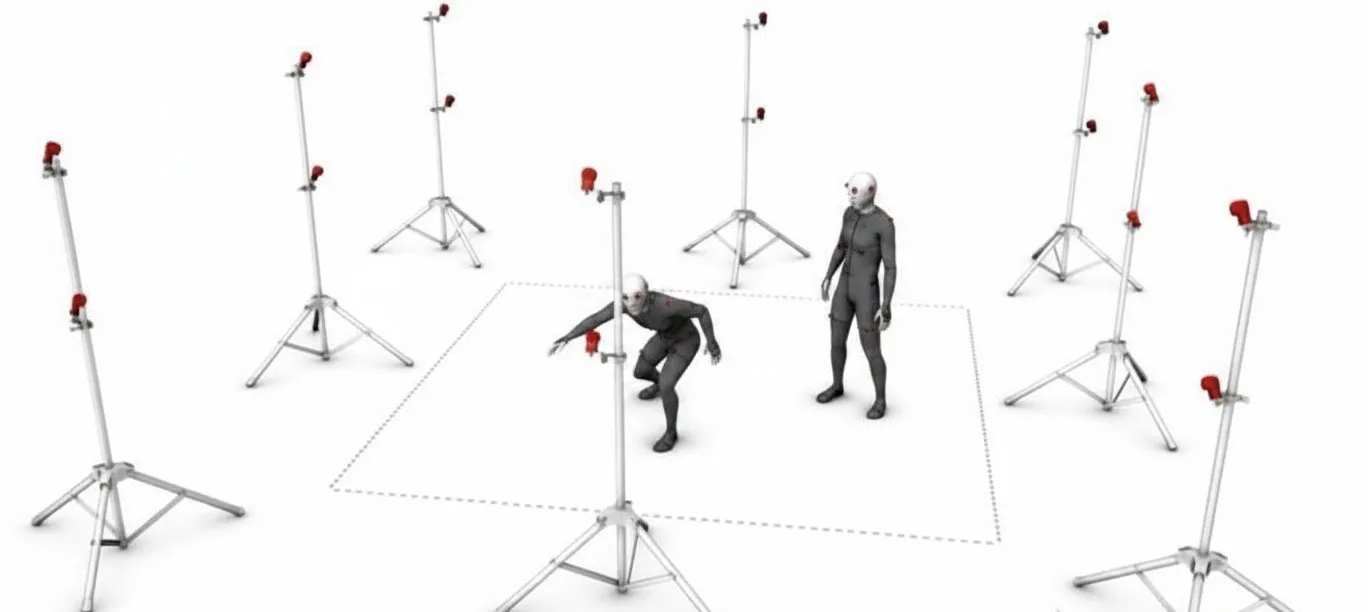
Inertial sensors such as accelerometers, gyroscopes, and magnetometers are attached to key nodes of the moving object. The sensors record motion data including the posture and heading of body segments. These data are transmitted to the processing unit, where they are corrected and fused to build a 3D model that moves correspondingly and naturally with the tracked subject.
Processed motion capture data can be applied to animation production, gait analysis, biomechanics, ergonomics, and related fields.
How the Sensors Work
An accelerometer measures the magnitude and direction of acceleration experienced by the sensor. It infers acceleration along its axes (X, Y, Z) by measuring force on internal components. Accelerometers are less precise for determining device orientation relative to the ground, and that limitation can be compensated by gyroscopes.
A gyroscope measures rotation by tracking angular velocity and the angle between its rotor axis and the device in a three-dimensional coordinate system. Gyroscopes are effective at measuring a device's rotational motion but cannot determine absolute heading. Magnetometers complement gyroscopes by measuring heading relative to the Earth's magnetic field, producing the angle between the device and the cardinal directions.
In motion capture systems, gyroscopes handle rotational motion, accelerometers handle linear motion, and magnetometers provide heading. In simple terms: the gyroscope tells whether we have turned, the accelerometer tells how far we moved, and the magnetometer tells the direction of movement. The three sensors are fused to track the target's motion accurately.