ALLPCB
ALLPCB


Overview
Electronic skin, also called wearable flexible bionic tactile sensors, is a system that enables robots to sense touch. It has a simple structure, can be formed into various shapes, and can adhere to device surfaces like clothing. Electronic skin allows robots to detect object location, orientation, hardness, and other tactile information.
Biological Skin vs Electronic Skin
Biological skin: senses different types of pressure (hardness), senses temperature and heat, senses air and water flow, and senses pain for protective functions.
Electronic skin: provides the functions of biological skin and can also offer capabilities biological skin does not have, such as sensing sound waves, ultrasound, and measuring blood pressure and heart rate.
Research History
In 2003, a research team at the University of Tokyo used a low-molecular organic compound, pentaphenyl, to make thin films. By densely arranging pressure sensors on the surface, they enabled electronic skin to perceive pressure.
Two years later, the same team embedded two sets of transistors that respectively sensed pressure and temperature into a special plastic film. Micro sensors placed at the transistor wire intersections recorded current fluctuations, allowing detection of normal temperatures and pressures above 300 grams per square centimeter.
In late 2009, Philips Research announced a technology called E-skin aimed at product surface appearance. As part of electronic paper research, this approach covered products with a color-changing layer that did not require a backlight, enabling color adaptation using ambient light for energy savings. Initial applications targeted the appearance enhancement of small devices such as mobile phones and portable media players.
A research team at the University of California, Berkeley developed an electronic skin made from a polymer resin and sensitive rubber covering germanium-silicon mixed nanowires, capable of sensing subtle pressures below 50 grams.
As advanced materials research progressed, materials such as graphene and carbon nanomaterials have been considered excellent substrates for electronic skin due to their ultrathin form, toughness, and low resistivity. For example, researchers in China used carbon nanotube sensors to create a highly sensitive skin capable of sensing the weight of a 20-milligram ant.
Functions and Benefits
- Restoring skin function for burn patients and amputees
Severe skin damage causes significant physical and psychological impact. Electronic skin can help restore some skin functions for burn victims and limb amputees.
- Enhanced robotic dexterity
Current electronic skin technologies enable robots and prosthetic limbs to grasp and manipulate objects, recognize surface texture and hardness, and sense temperature. Achieving simultaneous, high-sensitivity detection of heat and multiple types of pressure remains a technical challenge that research continues to address.
- Wearable health devices
Because electronic skin is soft and thin like human skin, it can be applied directly to the body to monitor physiological signals such as blood oxygen, pulse, heart rate, and body temperature. Some designs include drug-delivery interfaces that can release medication through the electronic skin based on real-time physiological data for targeted treatment. Electronic skin may also incorporate displays to show physiological metrics or simplified expressions and stress levels, creating new interaction channels between users and their surroundings.
Structure and Working Principle
Electronic skin typically consists of a three-dimensional interface stress detection unit, local point micro-stress detection units, and peripheral circuitry. The 3D interface stress detection unit uses arrays of flat-plate capacitive pressure sensors to detect normal and shear stresses at the interface. The micro-stress detection units use surface acoustic wave pressure sensors to detect localized small stresses.
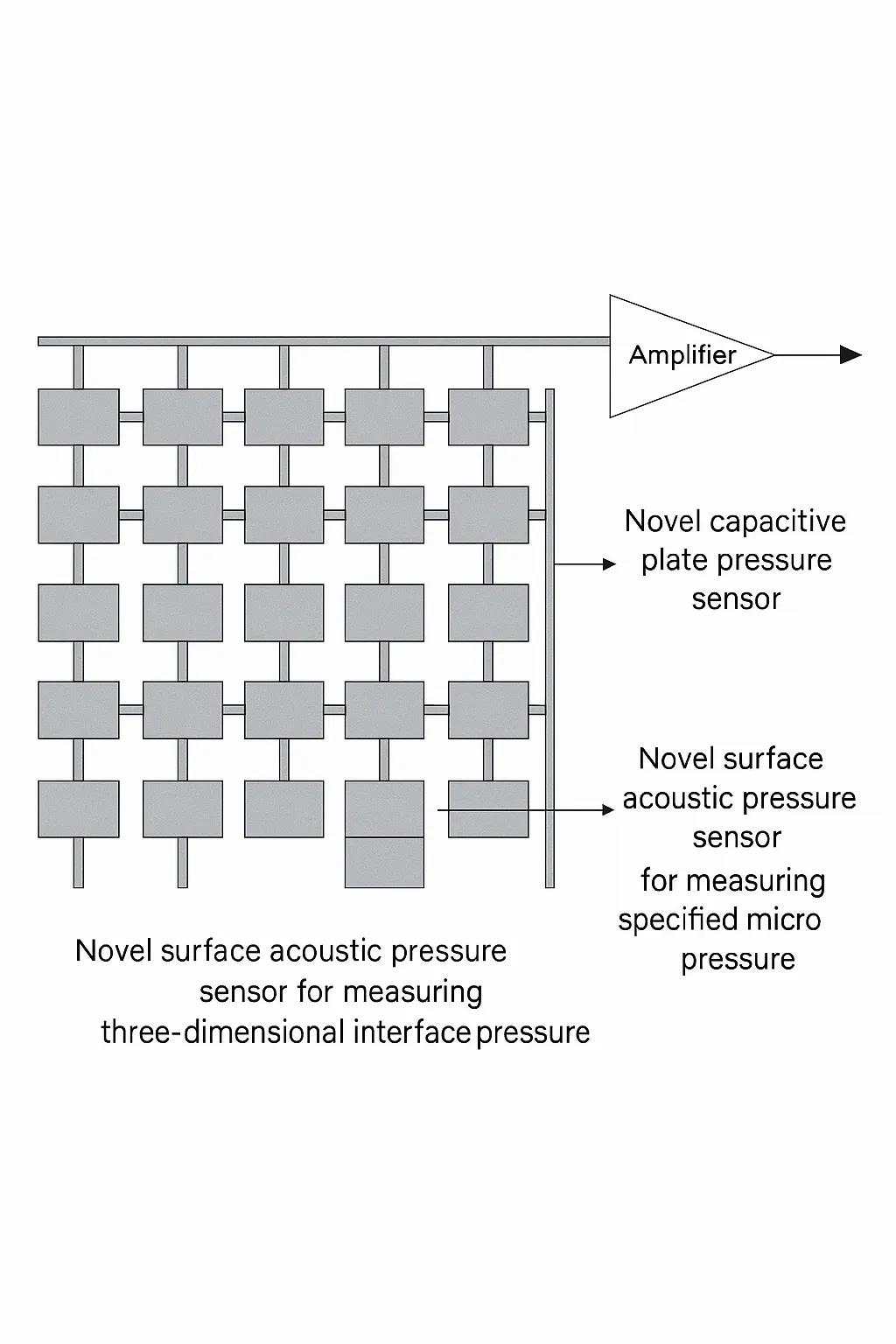
Basic principle: arrays of interconnected flat-plate capacitive sensors form a sensor matrix, with surface acoustic wave pressure sensors embedded at designated points that require micro-pressure detection. The sensor array connects to peripheral circuitry to form complete electronic skin. The system can monitor three-dimensional interface stress at each sensor unit and micro-stresses at specified points, outputting data to peripheral circuits to map the stress distribution in real time.
Sensor Types
1. Flat-plate capacitive pressure sensors
These sensors use a traditional three-layer structure: top layer, middle layer, and bottom layer. The top layer carries the driving electrode, the bottom layer carries the sensing electrode, and the middle layer uses a superelastic material. When a load is applied to the top layer, the middle layer deforms, changing the distance and effective area between the driving and sensing electrodes. The resulting change in output capacitance corresponds to the applied pressure.
Capacitance of a parallel-plate capacitor is proportional to electrode area and inversely proportional to electrode separation. Changing either parameter alters the output capacitance, which is used to quantify the applied mechanical stimulus.
2. Surface acoustic wave (SAW) pressure sensors
These sensors use a delay-line structure composed of a piezoelectric substrate, input interdigital transducer (IDT), output interdigital transducer (IDT), and peripheral circuitry. The piezoelectric substrate adopts a cantilever beam configuration with one end fixed and the other end subject to micro pressure. The input IDT excites a surface acoustic wave that travels across the substrate to the output IDT, which converts the received wave back into an electrical signal. The signal is amplified and output as a frequency. When micro pressure is applied to the cantilever, the strain changes the acoustic propagation path and thus alters the output frequency. The frequency shift is used to detect the micro pressure applied to the cantilever.
Product Applications
Prosthetic manufacturing
In China the number of people with disabilities exceeds 80 million, accounting for about 6.3% of the total population; among them, over 20 million have limb disabilities, approximately 30% of people with disabilities. Most amputees rely on prostheses, and prosthesis quality significantly affects their quality of life.
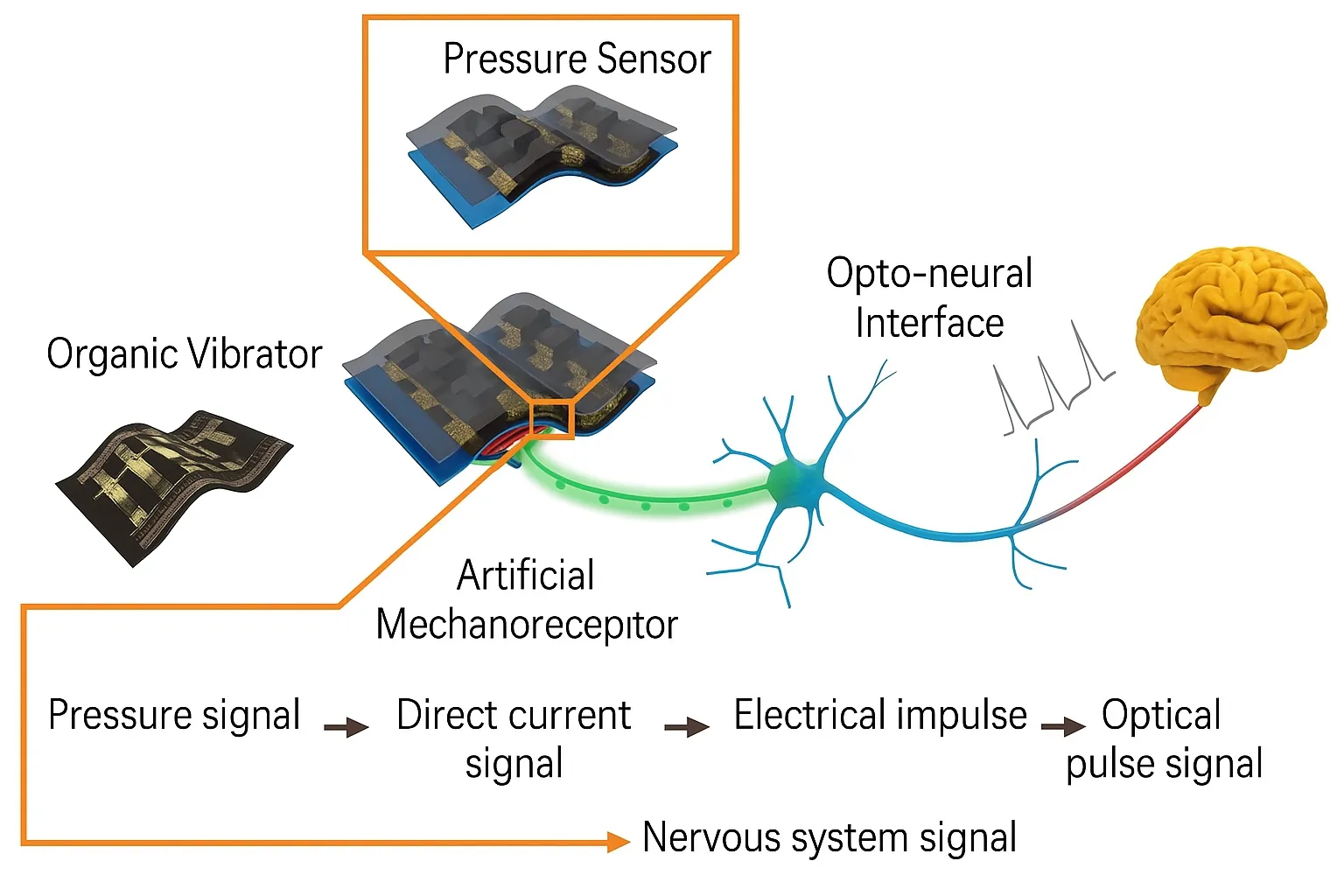
Electronic skin functions are not limited to pressure sensing. Modern designs include ultrathin single-crystal silicon nanoribbons with sensor arrays that cover pressure sensors, temperature sensors, humidity sensors, strain sensors, thermal heaters, and other neural-stimulation sensors. Electronic skin can respond to external stimuli with response times closer to human skin, which can substantially assist users who rely on prostheses.
Smart wearables
Electronic skin can adhere to the skin via electrostatic attachment and monitor pulse, heart rate, body temperature, and muscle vibrations in real time. By providing timely feedback on physiological changes, electronic skin can support early prevention and diagnosis of certain conditions. Some implementations include a drug-delivery interface that can release medication through the skin based on real-time physiological data to support targeted therapy.
Electronic skin with integrated displays can present physiological metrics such as heart rate or blood oxygen levels and can potentially convey simplified expressions or stress indicators. Beyond reducing the need for separate monitoring devices, this technology may introduce new interaction and communication channels.
Robotics
Electronic skin can provide robots with tactile perception similar to that of humans or animals, improving their adaptability and autonomy. A typical electronic skin system contains hundreds of independent sensors. The data collected enable robots to use tactile feedback to navigate, recognize their surroundings, and determine optimal paths. With tactile data and computational processing, robots can react to obstacles in real time and achieve flexible autonomous movement.
When applied to robotic manipulators, electronic skin enables fine control of contact force. Robots can sense object position and orientation as well as hardness, stiffness, temperature, and surface texture. Touch-based feedback helps determine subsequent actions and motion planning, allowing robots to execute assigned tasks according to control algorithms and mathematical models.