ALLPCB
ALLPCB


Overview
Spatial tracking is a core capability for VR systems. Common solutions on the market include Oculus Constellation infrared camera tracking and lighthouse laser tracking used by HTC and DPVR. Both approaches use PnP solving for pose estimation but have different trade-offs and application scopes. This article analyzes their principles, implementation details, and practical limitations.
Oculus Constellation: Camera-based optical tracking
Oculus uses a camera-based tracking solution called Constellation. The headset and controllers are populated with infrared sensors that blink in predefined patterns. A dedicated camera captures frames at a fixed rate (Oculus CV1 uses 60 fps), producing a sequence of images. From the 2D positions of the bright points in the images and a known 3D model of sensor locations on the headset or controller, the system computes the 3D positions and full pose (X, Y, Z and Yaw, Pitch, Roll) of the tracked device via a PnP (Perspective-n-Point) solver.
Detection and synchronization
To ensure reliable detection of the LEDs on the headset and controllers, the PC-side camera driver sends a command over the HID interface to power the LEDs. The LEDs flash in a distinctive pattern so the camera can distinguish them from ambient noise and partial occlusions. As long as a sufficient number of LEDs are visible from some camera angle, tracking continues to work.
Image format and matching
The camera records grayscale images (for example, 752×480 Y8) and only needs intensity values, not color. Given the 2D locations of detected LEDs in an image and the known 3D layout of LEDs on the device, the PnP problem can be solved to recover pose. In theory, three point correspondences are the minimum, but in practice four to five visible points are typically required to produce a reliable solution, which explains the dense LED placement on the headset.
Data refinement and sensor fusion
After an initial 6DOF estimate is obtained, the system may reproject the 3D model to 2D, compare it to the captured image, and minimize a reprojection error to refine the pose. Matching model points to detected image points is costly if done exhaustively, so Constellation relies on distinct blink patterns to establish correspondences quickly. Optical pose estimates degrade when objects move rapidly because feature detection in the captured frames becomes harder. To reduce motion-induced error, the optical solution is fused with IMU data to provide smoother, lower-latency pose estimates.
Advantages and limitations
Camera-based optical tracking is relatively simple to install and low cost, but image processing is complex. Fast motion hurts detection, and ambient light can interfere. Accuracy is limited by the camera resolution; consumer stereo cameras at 720p struggle to provide submillimeter precision. Camera range is also constrained, so conventional camera-based setups are generally better suited for desktop-scale VR. Recent multi-camera setups attempt to extend coverage toward room-scale, but they remain subject to the same intrinsic limitations.
Lighthouse: Laser sweep tracking
HTC and DPVR use lighthouse-style laser tracking to avoid the complexity of camera-based solutions. Lighthouse tracking offers high precision, low latency, and distributed processing capability, enabling room-scale tracking with fewer constraints on user movement.
Basic operating principle
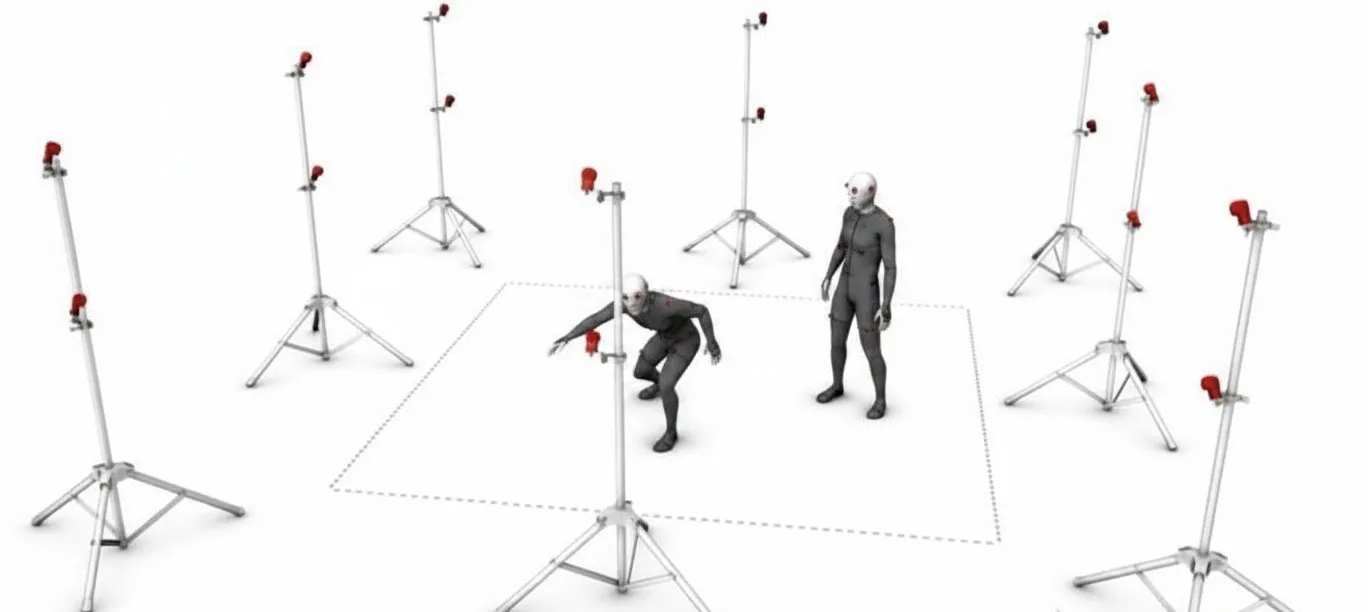
In HTC's lighthouse system, each base station contains two rotating motors. One motor sweeps a horizontal laser beam and the other sweeps a vertical beam. The base station refreshes at 60 Hz. During a cycle, the horizontal sweep occurs, followed by the vertical sweep 8.33 ms later, then the station goes idle while the other base station repeats the sequence. When a sensor on a tracked device is hit by both horizontal and vertical sweeps within the same cycle, the angles relative to the base station can be computed from the timing of the hits, and the projected coordinates on a reference plane are determined.
PnP and sensor fusion
Known sensor coordinates on a static model allow the system to compute rotation and translation relative to a reference, which is effectively another PnP problem. Fusing the angular timing-derived pose with IMU measurements yields accurate 6DOF pose for the headset and controllers. The computed pose is sent via RF to a receiver connected to the PC, which forwards the data to the driver or OpenVR runtime over USB and then to the application.
Advantages in large spaces
Lighthouse tracking is well suited to large environments because it does not rely on camera framing or image resolution. The angular timing approach scales to room-scale volumes, provides high precision, and supports fast update rates, making it preferable for locomotion-heavy VR experiences.
DPVR modifications to lighthouse tracking
DPVR introduced refinements to the lighthouse concept by adding a third motor to each base station. Numbered top to bottom, motor 1 scans vertically, motor 2 scans horizontally, and motor 3 scans vertically. Each motor operates for a 4 ms interval while the others remain idle. The sequence begins with motor 1 emitting a synchronization pulse so device sensors can reset counters, followed by vertical, horizontal, and vertical sweeps in 4 ms windows.
Because motor speed is fixed, the timing of a sensor hit relative to each motor start time yields the angle of incidence. That angle is encoded and transmitted via RF to the PC. Shorter scan intervals and additional temporal encoding reduce the number of sensors required on each device. In DPVR's E3P system, the total number of sensors per headset or controller is reported to be roughly one quarter of a typical lighthouse design, reducing hardware on the devices and simplifying sensor placement. Fewer sensors improve system robustness and lower headset and controller weight. The shorter per-scan interval also enables more frequent updates (every 4 ms) for controller orientation and pose.
Multi-station and occlusion resilience
To maintain coverage in room-scale environments and handle occlusions, DPVR uses dual base stations that operate in an alternating master/slave timing arrangement. The inherent stability of laser-based tracking and the reduced sensor count make DPVR's approach suitable for applications such as education and multiplayer setups, where multiple headsets must be tracked in the same space with limited infrastructure.
Summary
Camera-based optical tracking like Oculus Constellation is cost-effective and easy to deploy for desktop and limited-range scenarios but faces challenges with fast motion, ambient light, and absolute precision due to camera resolution. Laser sweep systems such as HTC's lighthouse and DPVR's enhanced lighthouse provide higher precision, lower latency, and better scalability for room-scale and multiplayer scenarios. Each approach has trade-offs, and system choice depends on the target use case, required range, and precision.