ALLPCB
ALLPCB


Overview
Monocular ranging was previously discussed: detected obstacle 2-D bounding boxes combined with camera pose and a road surface assumption. The following discusses specific algorithms based on published papers:
- Vision-based ACC with a Single Camera: Bounds on Range and Range Rate Accuracy
- Integrated Vehicle and Lane Detection with Distance Estimation
- Use of a Monocular Camera to Analyze a Ground Vehicle’s Lateral Movements for Reliable Autonomous City Driving
- Robust Range Estimation with a Monocular Camera for Vision-Based Forward Collision Warning System
- Pitch Angle Estimation Using a Vehicle Mounted Monocular Camera for Vehicle Target Range Measurement
- Forward Collision Warning with a Single Camera
Algorithm flow
The typical processing flow includes vehicle and lane detection, estimating the camera pose relative to the road, and computing distance from image projections and predefined scene assumptions.
Imaging geometry from the Mobileye paper
The Mobileye paper illustrates the imaging geometry as shown:
Own vehicle A, leading vehicles B and C, camera at P with focal length f and height H, and obstacle distances Z1 and Z2 for B and C. The contact points of the B/C bounding boxes project to y1 and y2 in the image. The relationship is y = fH / Z, so Z = fH / y. Below are estimation results for three different distances:
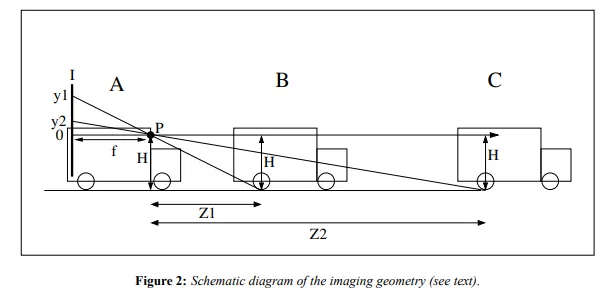
Accuracy measurements: at 90 m the error is about 10%, and at 44 m the error is about 5%.
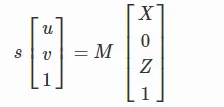
Distance formula from lane-width assumption
Assuming a lane width of 3.75 m, the projection matrix can be computed, yielding the following distance formula:
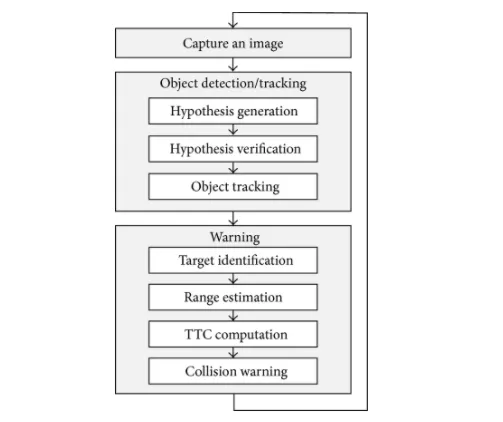
FCW system flow
The overall forward collision warning (FCW) system flow is shown below:
Safety distance estimation
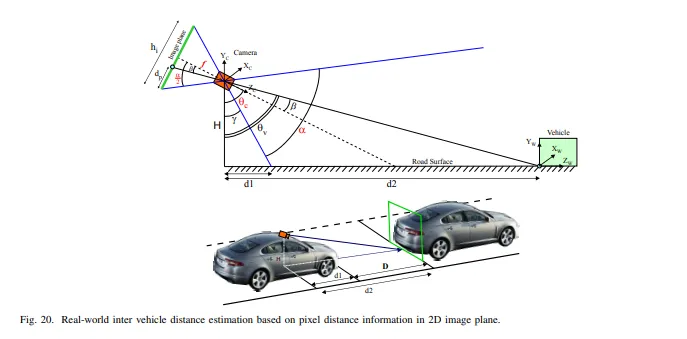
Collision warning requires estimating a safety distance. The geometric relations in the figure below yield the distance estimation formula: