ALLPCB
ALLPCB


01 Definition and Composition
According to GB 7665-2005, a sensor (transducer/sensor) is a device or assembly that senses a measured quantity and converts it into a usable output signal according to a certain rule. It usually consists of a sensitive element and a conversion element.
Sensor block components
The sensitive element is the part of the sensor that directly senses or responds to the measured quantity. It is the core of the sensor and converts the physical quantity into a signal.
The conversion element converts the quantity sensed by the sensitive element into an electrical signal suitable for transmission or measurement.
Basic conversion circuitry converts the electrical signal from the sensitive or conversion element into a form suitable for display, recording, or processing.
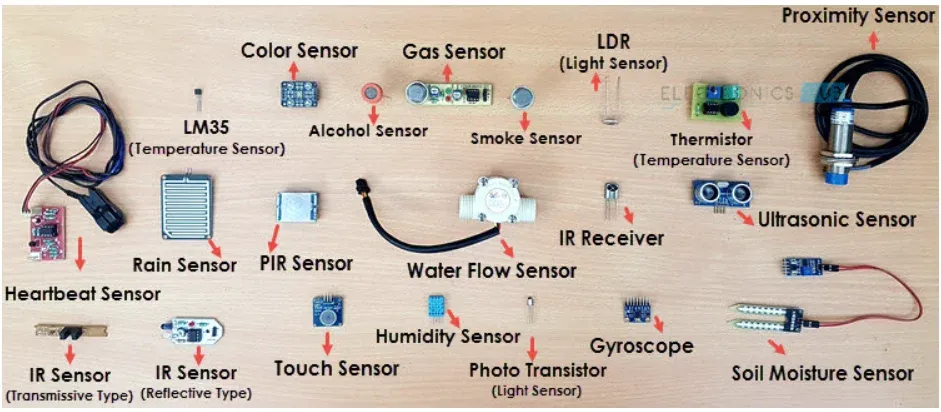
The measured quantity (sensor input) is an important basis for sensor naming and classification, e.g. non-electrical physical quantities such as temperature, humidity, pressure, displacement, flow, acceleration, and light.
If the output is a standardized signal it is referred to as a transmitter.
02 Graphical Symbols, Naming, and Codes
GB/T 14479-93 specifies graphical symbol representation for sensors. A square represents the conversion element, a triangle represents the sensitive element; X indicates the measured quantity; * indicates the conversion principle.
Example: capacitive pressure sensor.
GB/T 7666-2005 specifies sensor naming: a sensor product name should consist of a headword plus up to four modifiers.
- Headword: sensor.
- First modifier: measured quantity (including qualifiers).
- Second modifier: conversion principle, often ending with "type".
- Third modifier: feature description, e.g. structure, performance, materials, sensitive element; often ending with "model".
- Fourth modifier: main technical parameters (range, measurement span, accuracy, etc.).
Example: sensor, pressure, piezoresistive, monocrystalline silicon, 600 kPa.
When naming a product, modifiers other than the first (measured quantity) may be selected or omitted as appropriate.
GB/T 7666-2005 also defines coding methods: codes use uppercase pinyin letters (or international symbols) and Arabic numerals.
A complete sensor code includes four parts:
- Headword: "C" for sensor.
- Measured quantity: indicated by the first uppercase pinyin letter(s) of the Chinese character for the measured quantity, per GB/T 7666-2005.
- Conversion principle: indicated by the first uppercase pinyin letter(s) of the Chinese character for the principle, per GB/T 7666-2005.
- Serial number: Arabic numerals indicating design features, performance parameters, or product series; defined by the manufacturer.
Example: Hall-effect current sensor.
03 Sensor Characteristics and Specifications
3.1 Static Characteristics
Per GB/T 18459-2001, static characteristics describe the relationship between input and output when the measured quantity is constant or changes very slowly. Static characteristic curves are obtained by testing. For calibration and data processing, linear relationships are preferred and hardware/software compensation or linearization can be applied. If nonlinearity is small, linear fit methods are commonly used.
Common static characteristic metrics:
- Linearity: Under specified conditions, the maximum deviation between the calibration curve and the fitted straight line, expressed as a percentage of full-scale output.
- Sensitivity: The ratio of output change to the corresponding input change at stable operating conditions.
- Resolution: The minimum detectable input change within the specified measurement range. It is sometimes expressed as a percentage of full scale.
- Hysteresis: The maximum deviation between outputs at the same input when approached from increasing and decreasing directions under identical conditions.
- Repeatability: The inconsistency between characteristic curves obtained by repeatedly varying the input in the same direction under identical conditions. Numerically described by multiples of the standard deviation of measurements as a percentage of full scale.
- Accuracy (static accuracy): Includes precision, trueness, and combined accuracy. Precision indicates dispersion (random error), trueness indicates deviation from the true value (systematic error), and accuracy is the combined limit error. Engineering uses accuracy classes, denoted A, to indicate reliability of measurements.
- Other metrics: threshold (minimum detectable change near zero); stability and temperature stability (ability to maintain performance over time and varying temperature); drift (change of output over time with constant input), including zero drift and sensitivity drift; time drift; temperature drift.
3.2 Dynamic Characteristics
Dynamic characteristics describe the relationship between input and output when the input varies with time (periodic, transient, or random signals). Dynamic behavior depends on the sensor itself and the form of the measured quantity's variation.
Summary:
- GB/T 7665-2005 defines sensor product names and performance terminology.
- GB/T 7666-2005 defines naming and coding methods.
- GB/T 14479-1993 defines graphical symbols and representation rules.
- GB/T 18459-2001 defines definitions and calculation methods for main static indicators.
04 Communication Protocols for Sensors
Common automotive sensor communication protocols include CAN, LIN, FlexRay, MOST, PWM, PSI5, SPI, SENT, and Ethernet. Each has different application scenarios and characteristics:
- CAN (Controller Area Network): Widely used in automotive networks for sensors such as speed, temperature, pressure, and steering angle sensors. Supports multi-master communication, error detection and correction, and is suitable for applications requiring real-time performance and reliability.
- LIN (Local Interconnect Network): Used for cost-sensitive, lower-speed sensors and control units such as window controls, seat adjustment, and simple lighting. Simple and low-cost, suitable for low-speed, low-complexity applications.
- FlexRay: Used for safety-critical systems requiring high reliability and real-time performance, e.g. ESC, ABS, and autonomous driving subsystems. Supports high-speed, deterministic communication.
- MOST (Media Oriented Systems Transport): Mainly used for in-vehicle multimedia and infotainment systems for audio, video, and data streams. Supports high-speed data transfer with time synchronization.
- Ethernet: Increasingly used where large data volumes must be handled, e.g. ADAS and autonomous driving. Provides high bandwidth and network scalability.
- PWM (Pulse Width Modulation): Often used to represent analog sensor outputs (position, speed) by varying pulse width. Simple and robust against interference; suitable for long-distance transmission but limited to unidirectional, relatively low data rates.
- PSI5 (Precision Sensor Interface 5): Used for speed, position, and angle sensors. Supports high-speed transfer with error detection and correction for high real-time and precision requirements.
- SPI (Serial Peripheral Interface): Common between digital sensors and microcontrollers. Supports high-speed full-duplex communication and is pin-efficient though it may require additional hardware support.
- SENT (Single Edge Nibble Transmission): Single-wire protocol for high-resolution, high-reliability data transmission in sensors such as wheel speed, position, and pressure sensors. Includes robust error detection and checksum mechanisms.
Protocol choice depends on sensor type, required communication speed, data integrity needs, and system complexity. CAN and LIN are common for general automotive sensor communication, while FlexRay and Ethernet suit high-speed/high-precision applications. PWM is suitable for simple analog signaling; PSI5, SPI, and SENT are used for high-precision digital sensors.
05 Automotive Sensors Overview
Automotive sensors convert non-electrical signals into electrical signals and transmit vehicle operating and environmental information to control units. They collect vehicle body state data (temperature, pressure, position, speed, etc.) and environmental information, converting it to electrical signals for control.
Sensors can be grouped into vehicle-body perception sensors and environmental perception sensors.
Vehicle-body perception sensors are distributed across powertrain, transmission, chassis, safety, and comfort subsystems to acquire vehicle state information. They enable the vehicle to sense its own condition. Based on measured quantity, these include pressure, position, temperature, (linear) acceleration, angular velocity, air flow, and gas sensors. Many of these use MEMS-based implementations.
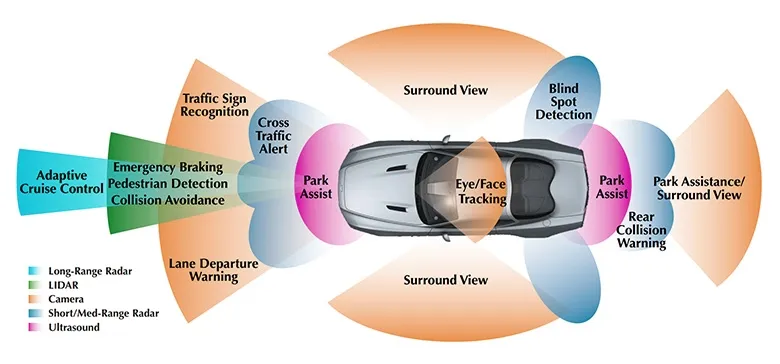
Environmental perception sensors collect and output surrounding environment information to support intelligent driving. These include vehicle cameras, ultrasonic sensors, millimeter-wave radar, and lidar.
Industry context in the Chinese market
Currently, sensor technology in the Chinese market remains in a catching-up stage. Several local chip and sensor companies such as Naixinwei, Junjie Electron, Paolong Technology, Ampelon, Huawei, and Sensitek have made progress, narrowing the gap with foreign suppliers.
Note: the figures and tables in the original article reflect the author's views.
Example company descriptions (neutral):
- Bosch: Bosch has semiconductor and sensor activities across braking, ADAS, cockpit, steering, and other vehicle subsystems, with a broad product range and supply chain presence.
- Continental (Conti): With global operations, Continental produces sensors such as wheel speed, crankshaft position, 12V battery management sensors, chassis position and acceleration sensors, electric drive rotor position sensors, and current sensors for power electronics. It has local R&D and manufacturing collaborations and has entered partnerships with local suppliers for certain localization projects.
- Paolong Technology: Paolong built a sensor product portfolio through development and market expansion in tire pressure monitoring systems (TPMS) and now offers automotive sensors including pressure, acceleration, and current types as well as sensors for driver assistance.
Overall, leading automotive sensor suppliers remain largely multinational, while companies in the Chinese market are advancing in technology and local production in specific segments such as TPMS and temperature sensing, and in ADAS-related sensors.
06 System-Level Roles of Sensors
Main automotive sensor types and their roles
| System | Sensor | Function |
|---|---|---|
| Braking | Wheel speed sensor | Measures wheel rotational speed. Data is essential for ABS to detect impending wheel lock and modulate braking force to maintain rotation. |
| Braking | Brake pressure sensor | Monitors hydraulic pressure in the brake system to ensure brake input force translates to appropriate braking effort and to detect leaks or faults. |
| Braking | Accelerometer | Detects vehicle acceleration in multiple axes to help determine motion state and optimize braking control. |
| Braking | Displacement sensor | Installed on the brake pedal to measure travel distance and infer driver braking intent for appropriate brake force modulation. |
| Braking | Steering angle sensor | Measures steering wheel angle to provide vehicle dynamics control systems with directional data for brake force distribution during turns. |
| Braking | Temperature sensor | Monitors temperatures of brake components and hydraulic fluid to prevent overheating and maintain braking performance. |
| Braking | Fluid level sensor | Monitors hydraulic fluid level in the brake reservoir to ensure sufficient brake fluid. |
These sensors provide real-time vehicle state information to improve braking safety and performance.
System operation overviews
Braking system (control flow): The control unit (ECU) receives brake pedal input via pedal sensors, computes required braking force, and commands hydraulic actuators. Wheel speed sensors provide feedback for adjustments. Modern systems include ABS, EBD, and TCS for enhanced control.
Steering system (control flow): The ECU reads steering wheel angle from angle sensors, computes desired steering actuator outputs, and controls the steering mechanism. Wheel speed and steering angle feedback are used to ensure precise steering. Modern systems often include EPS (electric power steering).
Suspension system (air suspension example): The ECU reads body acceleration and height sensors, computes required air spring pressure, and controls compressors, tanks, and valves to adjust ride height and stiffness. Feedback from height and pressure sensors is used for closed-loop control and adaptive functions.
Electric drive system: The motor controller receives driver inputs and navigation data, computes required torque and speed, and sends commands to the motor. Feedback from speed and torque sensors enables closed-loop motor control. Systems typically include regenerative braking, energy management, and diagnostics.
Thermal management: The BMS, motor controller, HVAC controller, and charging controller use temperature and current sensors to compute heating or cooling demands. Thermal subsystems actuate coolant circulation, compressors, and charging power to maintain components in their optimal temperature range.
Tire pressure monitoring (TPMS): Tire pressure sensors monitor tire pressure and temperature and transmit data wirelessly to the receiver and ECU, which processes the data and displays tire conditions. Modern TPMS include fault alarms, data logging, and tire position identification.
Low-voltage power management: The low-voltage system includes a battery, generator, regulators, fuses, and loads. The BMS and generator control unit use voltage and current sensors to compute required generation and charging strategies, maintaining system stability and providing diagnostics.
Autonomous driving systems: Perception modules (cameras, radar, lidar, ultrasonic, IMU) provide environment data to decision modules, which plan trajectories and send commands to actuators for steering, throttle, and braking. Feedback loops and HMI inform the driver. Functions include adaptive cruise, lane keeping, automated parking, and emergency braking.
Smart cockpit: The cockpit system integrates infotainment, navigation, communications, seating, ambient lighting, voice interaction, cabin cameras, and displays. User inputs via touchscreen, voice, or gestures are processed by the head unit and OS. In-cabin sensors provide data for adaptive comfort and personalization (seat, lighting, climate). Features include voice assistants, face recognition, and health monitoring.
Summary: Chassis sensors, electric drive, thermal management, suspension, ADAS, and smart-cabin sensors are key components. They collectively ensure vehicle performance, safety, and comfort.
Sensor categories and typical applications:
- Chassis sensors: Monitor dynamic behavior (speed, steering, braking, stability). Key sensors: speed, steering angle, brake pressure, lateral accelerometers. Used in ABS, ESC, TCS.
- Thermal management sensors: Monitor temperatures for engine, intake, oil, HVAC, and battery thermal control.
- Suspension sensors: Monitor ride height, travel, and road conditions for adaptive suspension and air suspension systems.
- Electric drive sensors: Monitor motor, battery, and power electronics (current, voltage, temperature, motor speed) for BMS, motor control, and energy recovery.
- Autonomous driving sensors: Perception sensors including cameras, radar, lidar, ultrasonic, and IMUs for lane keeping, adaptive cruise, automated parking, and navigation.
- Smart cabin sensors: In-cabin cameras, biometric sensors, environmental sensors, touch interfaces, and microphones for personalization, fatigue detection, gesture control, and comfort systems.
07 Future Trends
Automotive sensor development is driven by overall advances in vehicle technology and demand for safer, more efficient, and more comfortable driving experiences. Key trends include:
- Integration and intelligence: Sensors will become more integrated and perform higher-level data processing on vehicle compute platforms. On-sensor preprocessing and adaptive behavior will increase.
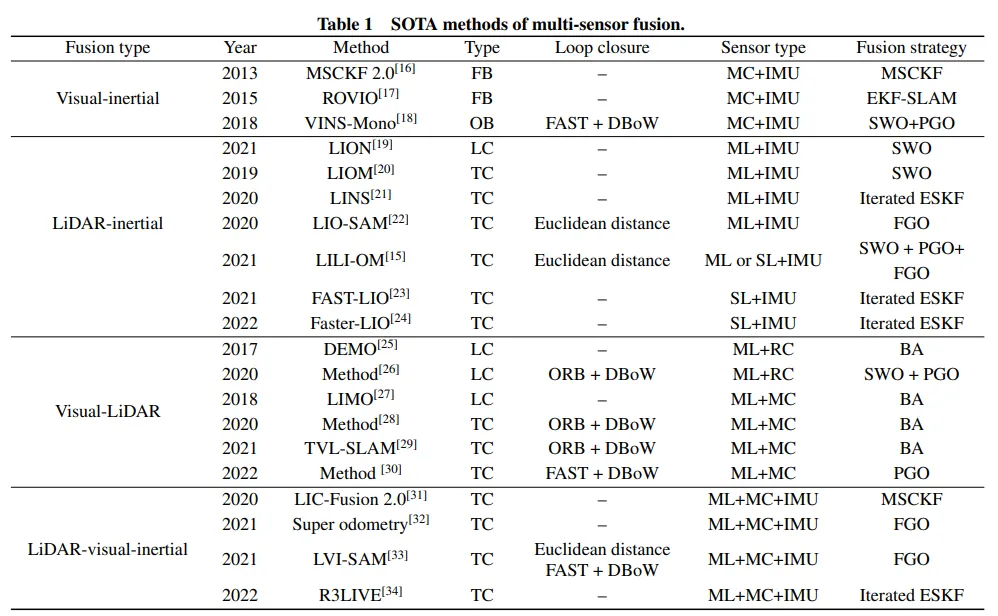
- Multi-sensor fusion: Combining cameras, radar, lidar, and ultrasonic sensors will improve perception accuracy for higher levels of automation.
- Longevity and reliability: Sensors will require greater durability and reliability to operate in extreme conditions over long periods, especially for EV and autonomous applications.
- Miniaturization and weight reduction: Sensors will trend smaller and lighter while maintaining or improving performance to support vehicle lightweighting.
- Low power and high energy efficiency: Energy-efficient sensor designs will help extend EV range.
- Wireless sensing: Wireless sensor technologies will reduce wiring complexity and ease installation and maintenance.
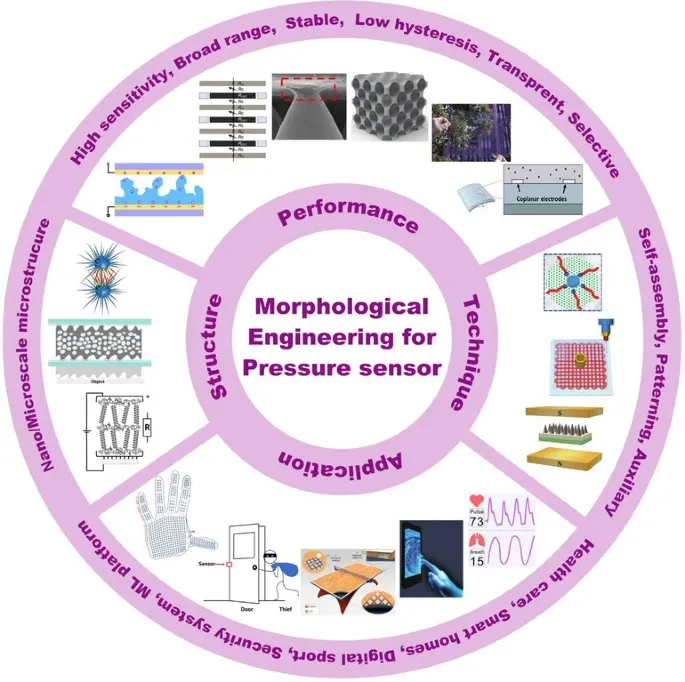
- New materials and processes: Advanced materials and manufacturing will improve performance and cost-effectiveness.
- Data security and privacy: As vehicle connectivity grows, sensor data security and user privacy protection will be important research and engineering areas.
- AI and machine learning: AI/ML will be widely used for sensor data analysis and decision-making to enable smarter vehicle behavior and diagnostics.
- Regulations and standards: Standards and regulations will evolve to ensure safety, interoperability, and reliability of sensor systems.