ALLPCB
ALLPCB


Overview
In current consumer VR devices, aside from the three major headsets (HTC Vive, Oculus Rift, PS VR), most headsets lack integrated motion interaction and require third-party devices. The absence of motion interaction limits the completeness of the virtual reality experience.
VR devices that support motion interaction can reduce motion sickness and increase immersion by allowing the user's body to interact with virtual scenes. Motion-interaction technologies include categories such as motion seats, treadmills, haptic suits, spatial localization, and motion capture.
Common motion-capture and spatial-localization technologies
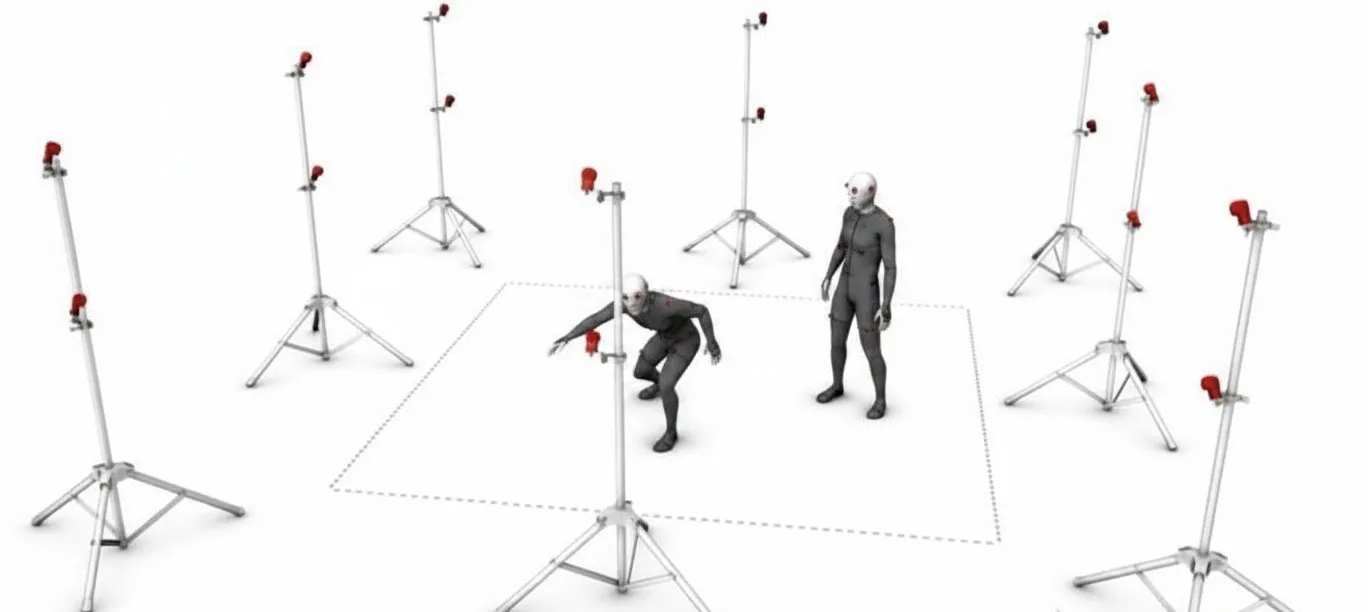
1. Laser localization
The basic principle is to install several laser-emitting units in the space that sweep laser beams horizontally and vertically. The tracked object is fitted with multiple laser sensors or receivers. By calculating the angular difference of the beams arriving at the object, the system derives the object's 3D coordinates. As the object moves, the coordinates update, providing motion information for capture.
Example
HTC Vive - Lighthouse localization
HTC Vive's Lighthouse localization uses lasers and photosensors to determine the position of moving objects. Two tower-like "lighthouses" are typically mounted on opposite corners of the play area; each lighthouse emits multiple laser sweeps per second with two scanning modules operating in horizontal and vertical directions. The headset and controllers contain many photosensors. By computing the time and angle at which each photosensor detects the laser, the system calculates the precise position and orientation of the headset and controllers.
Advantages and disadvantages
Advantages: Laser localization tends to have lower cost compared with some alternatives, offers high positioning accuracy, is tolerant of occlusion to a degree, requires relatively simple computation, and delivers very low latency. It supports multiple tracked objects and a large movement range.
Disadvantages: The system relies on mechanical scanning to control the laser sweeps, which can reduce long-term stability and durability. For example, if a lighthouse vibrates or its mechanical parts wear over time, tracking errors or failures can occur.
2. Infrared optical localization
This technique uses multiple infrared cameras installed around the space to capture the play area. Tracked objects either carry infrared reflectors that reflect the cameras' IR illumination or emit infrared light themselves. By capturing the reflected or emitted IR signals with multiple cameras and processing the images, the system computes the spatial coordinates of the tracked objects.
Example
Oculus Rift - active infrared optical localization plus nine-axis IMU
Unlike passive infrared optical systems that rely on reflectors, Oculus Rift uses active infrared by placing IR emitters on the headset and controllers. Two cameras with infrared filters capture only the IR light emitted from these devices. The software then computes headset and controller positions from the captured IR positions. Oculus also incorporates a nine-axis IMU (accelerometer, gyroscope, magnetometer) to estimate position during moments of occlusion or noisy optical tracking, improving overall tracking accuracy.
Advantages and disadvantages
Advantages: Standard infrared optical systems can achieve very high tracking precision with low latency. The active IR approach with IMU reduces system complexity compared with large passive camera arrays and can have long device lifespans.
Disadvantages: Full-scale optical setups are costly and require many cameras, so they are typically used in commercial installations. The active two-camera approach has limited usable area due to camera field-of-view constraints and supports fewer simultaneously tracked objects. Typical interactive area is around 1.5 m by 1.5 m.
3. Visible-light localization
Visible-light localization is similar to infrared optical tracking but uses visible light instead of IR. Tracked objects carry light sources of distinct colors so that cameras can identify and distinguish different objects and determine their positions by capturing the colored light points.
Example
PS VR
Sony's PS VR uses visible-light tracking. The headset emits a blue light that is captured by a camera to estimate position, and the motion controllers use lights of different colors such as cyan and pink. A stereoscopic camera captures these lights and the system computes the 3D coordinates of the light spheres.
Advantages and disadvantages
Advantages: Visible-light systems are low cost, simple to implement, and require no complex algorithms, making them easy to mass-produce. They are sensitive and generally robust and durable in controlled lighting conditions.
Disadvantages: Positioning accuracy is lower compared with some other methods, and the approach is sensitive to occlusion; if a light is blocked it cannot be located. Strong ambient lighting can overwhelm the tracking lights, and other light sources with similar colors can cause confusion. Camera field-of-view limits the movement area, and the number of trackable targets is limited by the available lights and camera resolution.
4. Computer vision motion capture
Computer vision-based motion capture uses multiple high-speed cameras that record a moving target from different angles. After capturing the target's motion, the system processes the multi-view images to reconstruct the target's 3D trajectory on a computer, yielding motion-capture data.
Example
Leap Motion gesture recognition
Leap Motion applies these principles for hand tracking. It mounts two cameras on the front of a headset and uses stereo vision to extract 3D position information for hands and fingers, constructing a 3D hand model and motion trajectory for gesture recognition and interaction.
Advantages and disadvantages
Advantages: Computer vision can capture multiple targets within a monitored area using relatively few cameras. Large-object tracking can be highly accurate, and tracked subjects do not need to wear devices, reducing constraints and providing a more natural interaction experience.
Disadvantages: The method requires substantial computational resources and has higher hardware requirements. It is sensitive to environmental conditions such as low light, cluttered backgrounds, and occlusion. Depending on camera placement and processing, fine-grained motions may be difficult to capture accurately.
5. Inertial sensor-based motion capture
Inertial systems require the tracked subject to wear modules that integrate accelerometers, gyroscopes, and magnetometers. The system comprises inertial sensors and a data-processing unit. The sensors collect kinematic data as the subject moves; the processing unit calculates sensor position changes and reconstructs motion trajectories using inertial navigation principles.
Example
Noitom - Perception Neuron
Perception Neuron is a flexible motion-capture system worn on the body. Small sensor modules integrate accelerometers, gyroscopes, and magnetometers, enabling capture of fine finger and limb movements as well as large-scale actions such as running and jumping. The system can transmit data wirelessly and provides a large amount of motion information.
Advantages and disadvantages
Advantages: Inertial systems are less affected by external factors, require no external lighthouses or cameras in the environment, and can capture a large volume of motion data with high sensitivity and good dynamic performance. They support wide movement ranges and can closely approximate natural interactions.
Disadvantages: The system must be worn on the body, which can be cumbersome. In addition, due to the sensors' operation.
Conclusion
Each motion-capture and localization technology has distinct strengths and weaknesses. For example, HTC Vive's laser localization provides high accuracy and a wide movement area but can suffer from reduced stability and durability. Oculus Rift's active infrared approach addresses some durability concerns but offers a more limited movement area.
Overall, for consumer VR today, laser localization is often the most practical because it provides the largest usable tracking area and high precision. In ideal conditions, inertial sensor systems such as Noitom's Perception Neuron can achieve finer motion capture while supporting larger movement, but these systems remain more common in commercial applications than in consumer products.
Looking ahead, computer vision–based motion capture is likely to become more important. As cameras, algorithms, and compute hardware improve, computer vision could outperform inertial systems by enabling fine-grained motion capture without wearable sensors. Demonstrations such as remote 3D holographic images from devices like HoloLens use similar techniques, although the technology is not yet fully mature.