ALLPCB
ALLPCB


Overview
Biomimetic strategies are an important approach to improving haptic sensor performance. The epidermal-dermal interlocking structure in skin effectively amplifies tactile stimuli and transfers them to mechanoreceptors, giving humans excellent pressure detection capabilities. Many biomimetic efforts therefore focus on mimicking this interlocking structure. Conventional biomimetic approaches often force a trade-off between sensitivity and measurement range: highly sensitive interfaces typically operate over a limited pressure window and cannot simultaneously deliver high precision and a wide sensing range. Efficiently balancing sensitivity and detection range to enable both fine pressure detection and large-range discrimination remains challenging.
Cross-Scale Design Strategy
Researchers at Xiamen University proposed a cross-scale design strategy to address this challenge. They created a composite of methylcellulose and carbon nanotubes to combine methylcellulose's film-forming properties with the excellent conductivity of carbon nanotubes. The composite improved the mechanical strength of the sensing layer and allowed it to conform to micrometer-scale surface topography to form a robust conductive network.
At the micrometer scale, the team used a peel-transfer technique to replicate randomly distributed microstructures from a template surface, emulating the epidermal-dermal interlocking structure to enhance both sensitivity and sensing range. At the millimeter scale, they assembled a bilayer arched structure to reconfigure the mechanical deformation process of the interface, optimizing the stepwise change in contact area. This combination enabled simultaneous improvement of sensitivity and detection range. The cross-scale design enabled cooperation between the sensing material and the structural layout, addressing the usual trade-off between sensitivity and range.
Paper and Funding
The work was published as "Programmable and Ultrasensitive Haptic Interfaces Enabling Closed-Loop Human–Machine Interactions" in Advanced Functional Materials. The first author is PhD student Wan-Sheng Lin, and corresponding authors are Professor Zhong Chen and Associate Professor Xinqin Liao. Funding sources included the National Natural Science Foundation of China, a regional collaborative project in the Fuzhou–Xiamen–Quanzhou innovation demonstration area, the Fujian Provincial Natural Science Foundation, and central university basic research funds.
Peel-Transfer Technique and Fabrication
Peel-transfer is widely used in wearable electronics to transfer sensitive materials onto flexible substrates. In this work, the team tuned the adhesion between the composite conductive film and the sandpaper template by adjusting methylcellulose viscosity, making it lower than the adhesion between the composite and PDMS. This ensured complete replication of the sandpaper morphology without damaging the functional sensing layer.
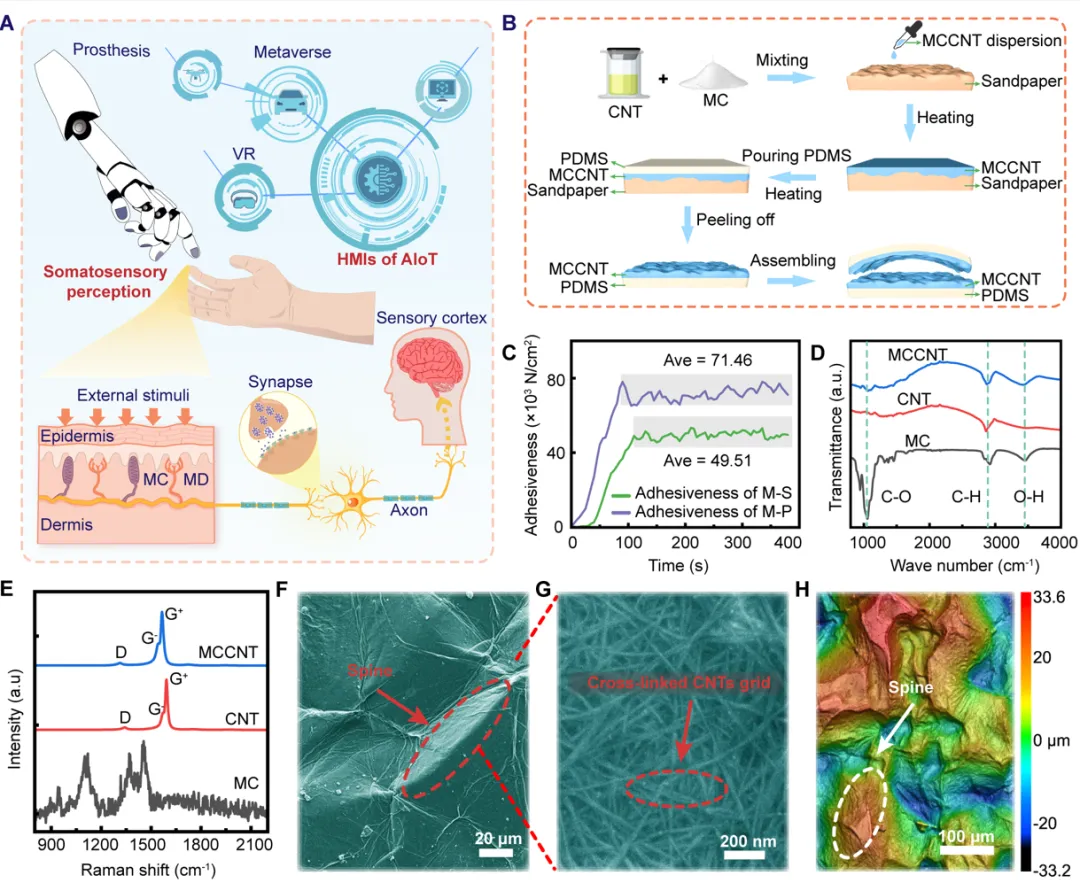
Figure 1 Cross-scale biomimetic haptic interface fabrication and characterization
Performance Metrics
The cross-scale biomimetic haptic interface achieved a pressure detection range up to 180 kPa and a detection limit of 8 Pa, well below the human skin threshold of approximately 100 Pa. Response time and recovery time were 5 ms and 8 ms, respectively, both shorter than the human tactile latency of about 30 ms. These fast pressure response times match the low-latency requirements of applications in artificial intelligence and the Internet of Things.
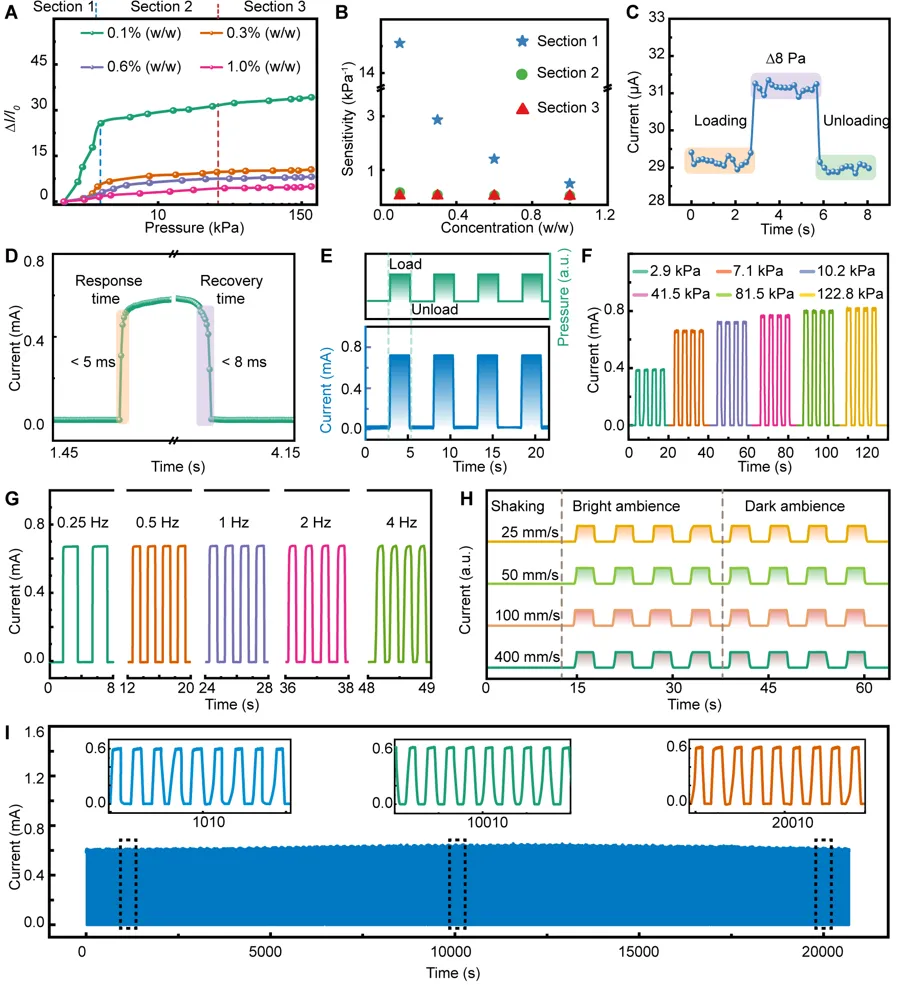
Figure 2 Electromechanical performance of the cross-scale haptic interface
Mechanism Study
The team used finite element analysis to investigate the underlying mechanism. Results show that the dual-arched structure and spine-like microfeatures significantly reduce the initial contact resistance under small pressures, while at higher pressures they provide additional structural support and conductive pathways. The cross-scale structural cooperation promotes simultaneous improvements in sensitivity and sensing range.
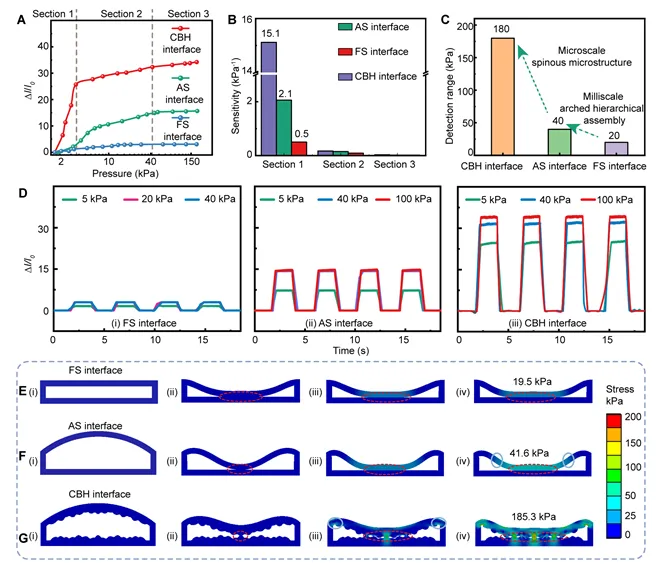
Figure 3 Mechanism study of the cross-scale biomimetic haptic interface
Applications: Wireless Pressure Data Glove
Data gloves serve as an important integration platform for cross-scale biomimetic haptic interfaces and can enhance overall interactive capabilities. The researchers developed applications including VR entertainment interaction and small vehicle control using a pressure-sensing data glove. The glove leverages the interface's high pressure discrimination to enable personalized multifunctional human–machine interaction, reducing redundant button-based controls and enriching interaction scenarios. The operation aligns with natural hand logic, enabling immersive interaction relevant to virtual reality. Users can operate the glove using only fingertip pressure perception, allowing unconstrained human–machine interaction around the clock, including in darkness.
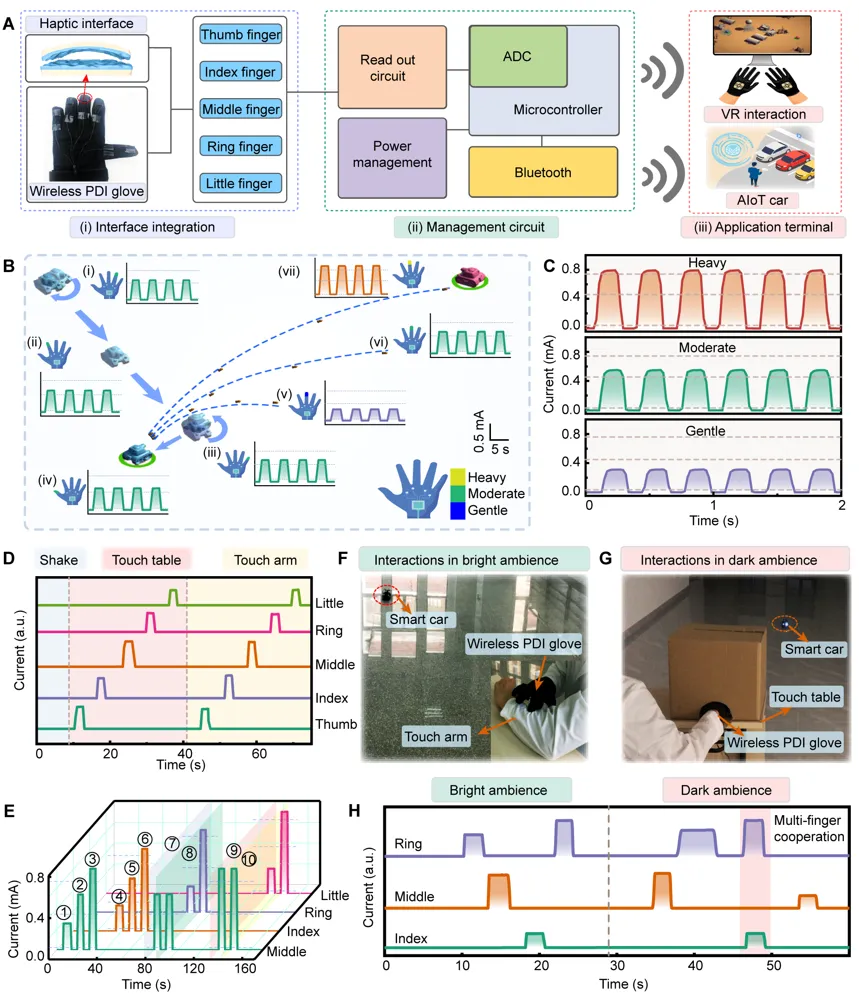
Figure 4 Human–machine interaction applications using a wireless pressure data glove