ALLPCB
ALLPCB


When it comes to robotics, precision is everything. Whether you're building an industrial robot arm or a delicate surgical bot, designing a robotics control PCB (Printed Circuit Board) for high-precision motion control is a critical step. This blog post dives deep into the essentials of robotics PCB design, focusing on high-precision motion control, servo motor control PCB layouts, encoder feedback PCB integration, trajectory planning PCB considerations, and closed-loop control PCB systems. We'll explore the key factors that ensure accuracy, stability, and performance in your robotic systems.
At its core, a well-designed robotics control PCB acts as the brain of your system, managing signals, power, and feedback to achieve smooth and accurate movements. From selecting the right components to optimizing signal integrity, every detail matters. Let’s break down the critical aspects of designing these boards for top-tier performance in motion control applications.
Why Robotics PCB Design Matters for High-Precision Motion Control
Robotics PCB design is the foundation of any high-precision motion control system. These boards handle complex tasks like processing sensor data, controlling servo motors, and ensuring real-time feedback for accurate positioning. A poorly designed PCB can lead to signal noise, delays, or even system failures, which are unacceptable in applications where precision is non-negotiable, such as in medical robotics or automated manufacturing.
High-precision motion control demands boards that minimize interference, handle high-speed signals, and support robust power delivery. For instance, in a robotic arm, the PCB must process encoder feedback signals at speeds of up to 10 MHz or more while driving servo motors with currents often exceeding 5A. Getting this right starts with understanding the unique challenges of robotics applications and addressing them through thoughtful design.
Key Considerations in Robotics PCB Design for Motion Control
1. Component Selection for Servo Motor Control PCB
Servo motors are the workhorses of high-precision robotics, providing accurate control over position, speed, and torque. Designing a servo motor control PCB starts with selecting components that can handle the specific demands of your motors. For example, choose motor drivers that support the required current and voltage ratings—often in the range of 12V to 48V and 2A to 10A per motor in industrial applications.
Microcontrollers or Digital Signal Processors (DSPs) are also crucial for processing control algorithms. A typical choice might be a 32-bit MCU with a clock speed of at least 100 MHz to handle real-time computations for multiple motors. Additionally, ensure that your PCB includes proper heat dissipation solutions, such as thermal vias or heat sinks, since motor drivers can generate significant heat under load.
2. Encoder Feedback PCB Integration for Precision
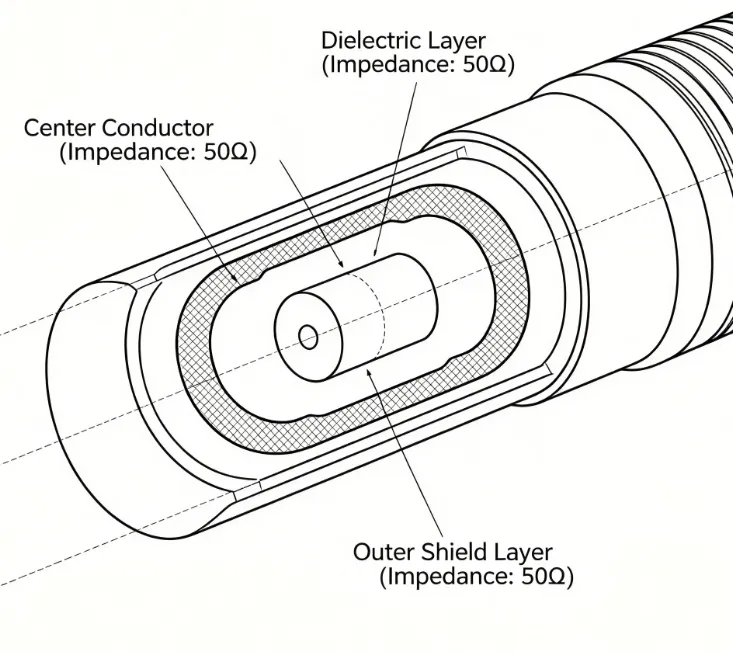
Encoders provide critical feedback on position and speed, enabling closed-loop control in robotics. An encoder feedback PCB must be designed to process signals with minimal latency and noise. Optical or magnetic encoders often output differential signals that require careful routing to avoid crosstalk. Keep signal traces short and use impedance matching—typically around 50 ohms for high-speed lines—to maintain signal integrity.
Place noise-sensitive components like encoder interfaces away from high-current paths, such as motor power lines. Adding bypass capacitors (e.g., 0.1 μF ceramic capacitors) near the encoder ICs can further reduce noise. These small details ensure that feedback data is accurate, allowing your system to make real-time adjustments for precise motion.
3. Trajectory Planning PCB: Processing Power and Algorithms
Trajectory planning is the process of calculating the path a robot must follow to achieve smooth and efficient motion. A trajectory planning PCB needs robust processing power to handle complex algorithms like inverse kinematics or spline interpolation. This often means integrating high-performance MCUs or even FPGAs (Field-Programmable Gate Arrays) that can perform calculations at speeds exceeding 200 MHz.
Beyond processing power, ensure that your PCB layout supports high-speed communication buses like SPI or I2C for transferring data between sensors, controllers, and actuators. Keep trace lengths under 10 cm for high-speed signals to prevent delays, and use ground planes to minimize electromagnetic interference (EMI). These steps are vital for real-time trajectory adjustments in dynamic environments.
4. Closed-Loop Control PCB: Ensuring Stability and Accuracy
Closed-loop control systems use feedback to continuously adjust motor outputs, ensuring precision even under varying loads or conditions. Designing a closed-loop control PCB involves integrating sensors, controllers, and actuators into a cohesive system. For instance, a PID (Proportional-Integral-Derivative) control loop might be implemented in firmware, requiring the PCB to support fast analog-to-digital converters (ADCs) with sampling rates of at least 100 kHz.
Power supply stability is also critical in closed-loop systems. Voltage fluctuations can disrupt control signals, so use low-dropout regulators (LDOs) or switching regulators to maintain a steady 3.3V or 5V for control circuitry. Additionally, separate analog and digital ground planes to prevent noise from digital switching circuits from affecting sensitive feedback signals.
Optimizing Signal Integrity in High-Precision Motion Control PCBs
Signal integrity is a make-or-break factor in robotics PCB design for high-precision motion control. High-speed signals from encoders or communication buses can degrade if not handled properly, leading to errors in positioning or timing. Start by using controlled impedance traces for high-frequency signals, targeting values like 50 ohms or 100 ohms depending on the protocol.
Avoid routing sensitive traces near high-current paths, such as those connected to servo motors, to prevent EMI. If crossing is unavoidable, route them at 90-degree angles to minimize coupling. Additionally, use multilayer boards—often 4 to 6 layers—to dedicate entire planes to ground and power, reducing noise and improving overall stability.
Power Management for Robotics Control PCBs
Robotics systems often require multiple voltage levels—5V for logic, 12V or 24V for motors, and sometimes 3.3V for sensors. Efficient power management in your PCB design ensures that each component gets the right voltage without interference. Use separate power rails for analog and digital circuits to avoid noise coupling, and place decoupling capacitors (e.g., 10 μF and 0.1 μF) near power pins of ICs to smooth out transients.
For high-current applications like servo motor control, ensure that power traces are wide enough to handle the load—typically 20 mils per ampere as a rule of thumb. Copper thickness also matters; opt for at least 2 oz copper for high-current paths to minimize voltage drops and heat buildup.
Thermal Management in High-Precision Robotics PCBs
Heat is a major concern in robotics control PCBs, especially when driving powerful servo motors. Excessive heat can degrade component performance or cause failures, so thermal management must be a priority. Use thermal vias under high-power components like motor drivers to transfer heat to the opposite side of the board, where it can dissipate more effectively.
Incorporate heat sinks or forced-air cooling if your system operates at high currents for extended periods. For example, a motor driver handling 8A continuously might require a heat sink with a thermal resistance of less than 5°C/W to keep temperatures below 85°C. Simulate thermal performance during the design phase using software tools to identify hotspots before manufacturing.
Testing and Validation of Robotics Control PCBs
Once your PCB is designed and assembled, thorough testing is essential to ensure it meets the demands of high-precision motion control. Start with basic functionality tests, such as verifying voltage levels at key points using a multimeter. Then, move to dynamic testing by running the system under load to check for signal delays, noise, or thermal issues.
For servo motor control and encoder feedback systems, use oscilloscopes to measure signal timing and integrity. Ensure that encoder signals maintain clean edges without jitter, and confirm that motor response matches the input commands within a tolerance of ±0.1 degrees for position control. Iterative testing and tweaking are often necessary to achieve optimal performance.
Future Trends in Robotics PCB Design for Motion Control
The field of robotics is evolving rapidly, and PCB design must keep pace. One emerging trend is the integration of AI algorithms directly onto control boards, enabling on-the-fly trajectory planning and adaptive control. This requires PCBs with even greater processing power and memory, often pushing designers toward compact, high-density layouts.
Another trend is the use of flexible or rigid-flex boards for humanoid or wearable robotics, allowing for better integration into confined spaces. Materials with high-frequency capabilities are also gaining traction to support faster communication protocols, ensuring that robotics systems remain responsive as demands for precision grow.
Conclusion: Building the Future of Robotics with Precision PCB Design
Designing robotics control PCBs for high-precision motion control is a complex but rewarding endeavor. By focusing on critical aspects like servo motor control PCB layouts, encoder feedback PCB integration, trajectory planning PCB processing, and closed-loop control PCB stability, you can create systems that deliver exceptional accuracy and reliability. Attention to signal integrity, power management, and thermal design further ensures that your robotics application performs at its best.
Whether you're working on an industrial automation project or a cutting-edge robotic prototype, a well-designed PCB is the key to unlocking smooth, precise motion. With the right approach and tools, you can overcome the challenges of robotics PCB design and build systems that push the boundaries of what's possible in motion control technology.