ALLPCB
ALLPCB


Digitally controlled, electronically commutated motors are rapidly replacing traditional designs, offering designers unprecedented dynamic control, power, and efficiency. As engineers advance these designs in industrial, HVAC, consumer electronics, and automotive systems, there is a growing demand for smarter algorithms and more complex control features while still containing costs. Renesas Electronics has created a demonstration to show how this can be achieved.
Our solution example showcases the capabilities of the RA8T1 motor control MCU, demonstrating independent control of two motors while simultaneously running multiple AI inference modules to detect operational anomalies. We address shaft misalignment and load imbalance—common real-world issues in motor systems. However, these are just examples of the numerous advanced algorithms that the RA8 core enables engineers to implement in embedded motor control designs. The demonstration is built around our RealityCheck Motor Toolbox for creating and deploying AI solutions based on sensorless motor control. This workflow connects functionality in e2 studio with Renesas' cloud-based Reality AI Tools machine learning system. We also allow users to combine AI modules created with Reality AI Tools with open-source AI models imported from other machine learning platforms via the Renesas e-AI Translator. All generated code is compact and efficient, leaving ample resources on the MCU for other tasks.
A Quick Look at the RA8T1
The RA8T1 32-bit MCU features an Arm Cortex-M85 core with Helium technology, running at up to 480 MHz in a package optimized for motor or inverter control. Compared to other motor control solutions on the market, the RA8T1 offers higher performance and advanced features, providing ample processing power for advanced algorithms like AI while maintaining precise electronic control over multiple independent motors.
For AI operations, the combination of Arm's Helium technology and 2 MB of tightly coupled D-cache allows the RA8T1 to achieve up to 10 times the inference speed of other Arm cores at similar clock rates. This provides a significant advantage for engineers, making it feasible to run complex algorithms and decision-making processes that were previously impractical on mid-range MCUs.
Two Motors, Two AI Modules, One Core
In this application example, the RA8T1 independently controls two different motors while running two distinct AI inference modules.
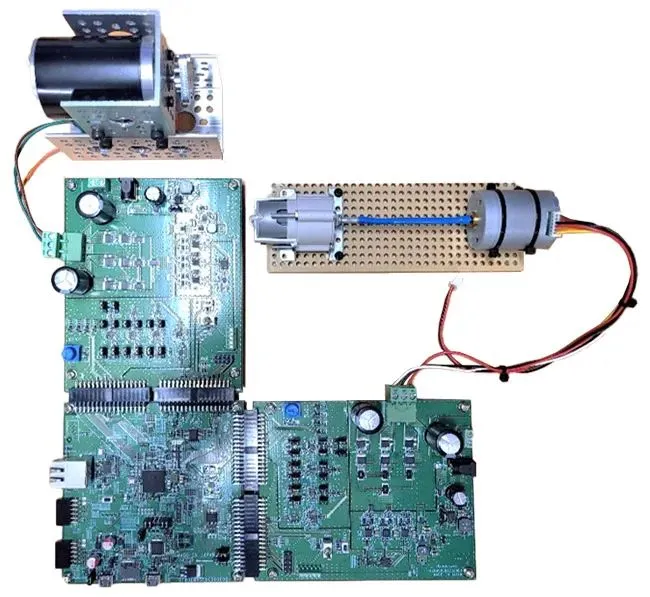
Figure 1. MCK-RA8T1 with two inverter boards for controlling two separate motor assemblies
This setup demonstrates the detection of two common anomalies in real-world motor operation: shaft misalignment and load imbalance. Shaft misalignment occurs when a motor's output shaft is not perfectly spatially aligned with the load it drives, causing unplanned torque and friction. Load imbalance occurs when the system driving the load becomes dynamically unbalanced, creating oscillating forces as the motor rotates perpendicular to the shaft and variations in load resistance during each rotation.
Both conditions are serious problems for motor systems, leading to issues ranging from power loss and excessive noise and vibration to rapid bearing wear and hazardous structural failures. In some applications, such as high-power industrial systems, even minor deviations from correct alignment and balance can cause significant concern over time. In others, like a washing machine, a certain amount of imbalance is expected, but exceeding it can lead to internal collisions and machine failure.
To create a shaft alignment problem on a small scale, our first motor is configured with a shaft connecting it to a gearbox. When the board holding the motor is slightly deformed by a finger push, the shaft flexes and moves out of alignment with the gearbox.
To demonstrate a balance problem, our second motor is configured with an aluminum hub into which we can optionally insert a small M4 screw. Without the screw, the hub provides a normal, balanced load for the drive motor. Adding the screw unbalances the motor load by a small amount.
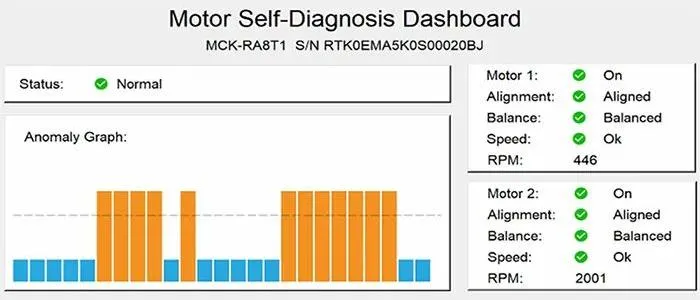
Figure 2. Dashboard showing status data from the board
Our two AI modules have been trained to detect these two conditions. We then added communication to a dashboard display (shown in Figure 2) so we can see what is happening in real-time.
The display labels the condition for each motor, with status indicated by a color code and text. It also includes a scrolling timeline that shows orange whenever the system sees an anomaly relative to a specific threshold (i.e., an unaligned or unbalanced state).
As shown in Figure 3, a significant number of processes are running simultaneously on the RA8 MCU. We have two independent instances of vector motor control algorithms driving the BLDC motors. Each of these instances also sends real-time data from the control process to two coupled AI inference modules. The AI modules monitor this data to distinguish normal behavior from problematic behavior. Since only internal motor control data is used, the AI system does not require additional sensors to monitor for anomalies. This is a key feature of the RealityCheck Motor Toolbox, allowing engineers to create AI monitoring solutions without adding any sensor BOM cost to their designs.
As shown in Table 1, our AI modules have extremely small RAM and flash footprints, and leveraging the advanced features of the RA8T1, they are both very fast. The total flash used by both is under 14 KB, and RAM is less than 5 KB. Each module executes an inference in under 1 ms, so even with 8 inferences per second for each motor subsystem, the load on the CPU is very small.
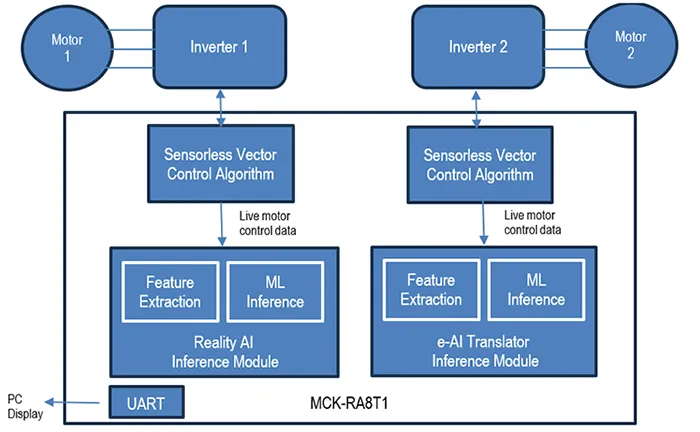
Figure 3. Process and data flow in the two-motor AI example
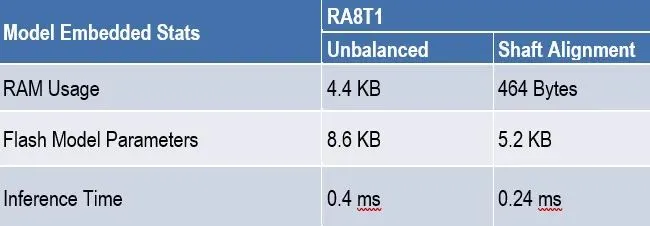
Table 1. Embedded model metrics
How Was It Built?
The process starts with the seamlessly integrated workflow that Renesas provides for e2 studio users to interact with Reality AI Tools, all part of our RealityCheck Motor Toolbox. The functionality is shown in Figure 4. Engineers can connect to a Renesas motor control MCU and collect data directly into our Data Storage Tool Plug-in. This can be done using an evaluation kit like the MCK-RA8T1 or on their own Renesas MCU-based hardware design. Our toolbox provides example code associated with the Renesas Flexible Software Package (FSP) stack, guiding users in selecting and capturing real-time data parameters from the vector motor control algorithm. Within minutes, users can be collecting data in real-time from their board under actual motor use conditions.
Reliable AI results always start with structured data collection. We collected data examples under a variety of conditions that addressed the detection categories of interest, as well as data variations for the motion conditions we expect to see in practice.
Specifically for unbalanced load detection, our data collection matrix had two columns of variation: (1) with and without the screw in the hub, and (2) across the range of speeds we wanted to address. To build our demo, we collected data samples for these combinations of conditions, repeating multiple times to cover the random variations that occur in any physical setup. Table 2 shows an example data coverage matrix.
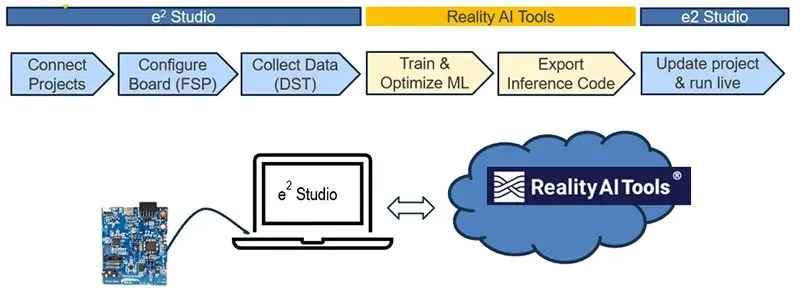
Figure 4. The RealityCheck Motor Toolbox provides a seamless round-trip workflow for creating motor AI
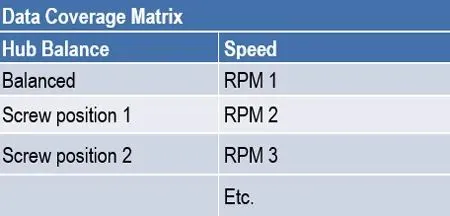
Table 2. Data collection plan for unbalanced load detection
From the e2 studio Data Storage Plug-in, this data can be uploaded directly to the cloud, where we use Reality AI Tools to train and optimize a machine learning model. The process is highly automated using our proprietary AI Explore methodology, but also provides for extensive testing, tuning, and optimization that users can employ. Once we are satisfied with the accuracy of the model in the cloud, we can generate an inference module and export the embedded library code directly back to e2 studio for testing. Users get a simple, fast end-to-end workflow from raw data to final code generation.
What If You Have Your Own AI Model?
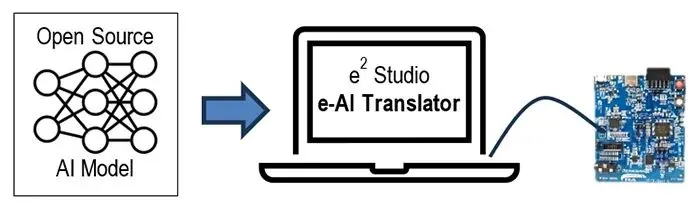
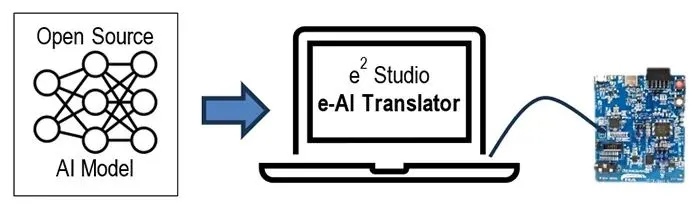
Figure 5. The e-AI Translator allows you to import AI models from open-source platforms like Keras, TensorFlow, and PyTorch as code in your e2 studio project
Some customers prefer to bring their own AI models, developed in well-known open-source frameworks like Keras, TensorFlow, or PyTorch. The RealityCheck Motor Toolbox allows for this as well, with the help of the Renesas e-AI Translator plugin. This powerful e2 studio plugin enables users to import open-source-created AI, converting them into compact C-code that can be directly linked into your project.
This is how we built the shaft misalignment detector. We again collected data in a similar fashion as before, using the RealityCheck Motor data acquisition and Data Storage Tool in e2 studio. But instead of going through Reality AI Tools, we imported this new data into a Python framework and used Keras to train our demonstration AI model there. We then used the e-AI Translator to import the fully trained Keras model into our project code. This model was already configured to handle the data stream from our RealityCheck Motor capture functions, making it easy to integrate the e-AI inference code with the rest of our project.
This example shows how we can easily combine AI modules created with the Reality AI Tools workflow with those imported from other sources via the e-AI Translator. Users can import any deep learning or neural network model from common training frameworks, so if you prefer to bring your own model, we can accommodate that.
Conclusion
The RealityCheck Motor Toolbox combines the Renesas e2 studio IDE with our cloud-based Reality AI Tools machine learning environment to create a seamless, end-to-end workflow for users—from data collection to AI model building to compact, efficient embedded code. All of this works with your choice of Renesas Motor Control MCU, whether on an evaluation board or in your own product hardware. Users can easily create AI modules that run directly on the same MCU, in many cases without requiring any sensors other than the real-time data from the motor control algorithm. Customers who wish to bring their own models from open-source AI platforms can do so using the e-AI Translator import feature.
The RA8T1 32-bit motor control-optimized MCU features a high-performance Arm Cortex-M85 core and advanced capabilities, including Helium and tightly-coupled D-cache, to deliver up to 10x algorithm acceleration. This power supports multiple motors, multiple embedded AI modules, and other advanced algorithms, all within a single cost-effective MCU.