ALLPCB
ALLPCB


Project overview
Product names
Product name (Chinese): Immersive intelligent mobile chess robot
Product name (English): Hackathon-TTT
Concept
This project develops a chess robot that can move autonomously, supports voice interaction, and plays human-vs-machine games on a real board, providing players with an immersive experience similar to playing against a human.
Key features
- Real board and pieces: Uses real pieces, a board, and a mechanical arm to deliver an immersive playing experience.
- Voice interaction: Supports voice interaction to enhance gameplay.
- Autonomous mobility: Can navigate to a scheduled player location to conduct a match.
Target users and use cases
Target users: Chess enthusiasts and people interested in AI applications.
Use cases: Offices, campuses, parks, homes, hotels, and similar environments.
Overall system design
System architecture
All modules are mounted on a modified mobile cart platform. The architecture is divided into three layers: upper applications, main control, and lower support. The lower support layer includes a 7.4V lithium battery, the mobile platform, and the chess table. The main controller is the RDK X3, which runs all upper-level applications. The upper application layer is divided into four modules: voice interaction, board perception, manipulator control, and autonomous navigation.
Based on this architecture, the system workflow is as follows.
Hardware architecture
Based on the overall architecture, the hardware design includes the following components:
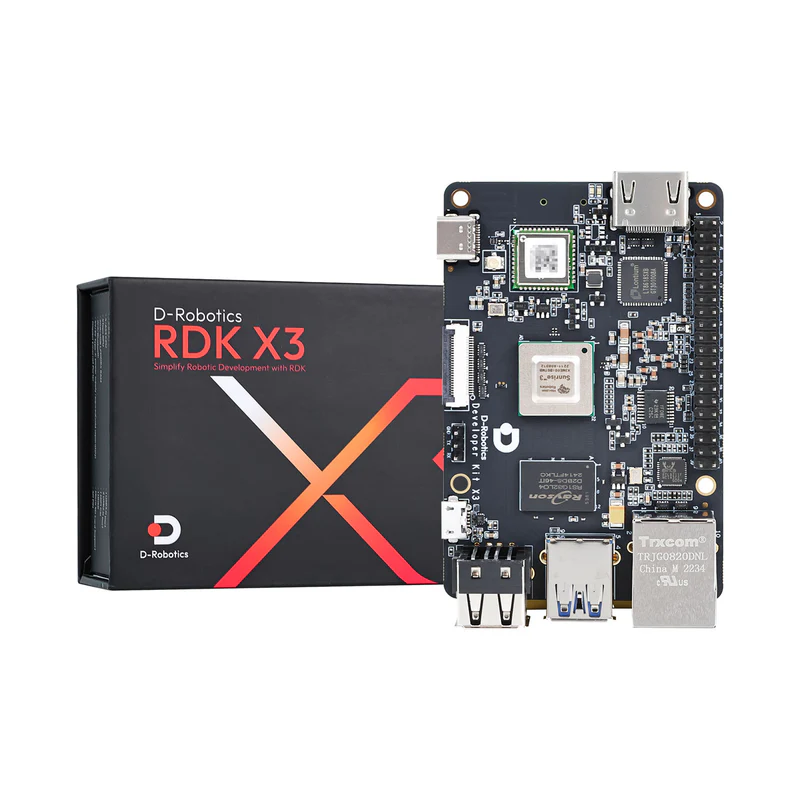
- Main controller: RDK X3, responsible for deploying and running software.
- Motor drivers and motors: RDK X3 outputs PWM control signals to drive the mobile platform.
- LiDAR: Connected to RDK X3 via USB for mapping and localization.
- Camera: Connected to RDK X3 via USB to monitor the board state.
- Microphone, amplifier, and speaker: Connected via USB to the RDK X3 for audio capture and playback.
- Manipulator: Connected via a serial bus to the RDK X3; a Raspberry Pi outputs control signals to the arm.
Software architecture
The software architecture is built on the TROS system, with each functional component implemented as a node. The main nodes are:
- Image publisher node: Captures camera images and publishes them.
- Board recognition node: Subscribes to image topics, performs board recognition, and publishes recognition results.
- Game-playing node: Receives board recognition and speech recognition topics, runs the game logic, and publishes the next move.
- Speech recognition node: Reads microphone data, performs speech recognition, and publishes the results.
- Speech playback node: Receives recognition results and plays voice prompts.
- Mapping node: Performs mapping and stores the map.
- Navigation node: Handles localization and path planning.
- Mobile platform control node: Receives navigation results and issues motor control commands.
- Manipulator control node: Receives outputs from the game-playing node and controls the arm to pick, place, and reset pieces.