ALLPCB
ALLPCB


Overview
LiDAR plays an important sensing role in functions such as NOA, AEB and other driver assistance features, and is a key sensor for vehicle safety. As the 3D vision of intelligent vehicles, a LiDAR's resolution determines how finely it can reconstruct the environment. Higher resolution yields denser point clouds, giving systems more time for reaction and decision making.
Unlike a 2D camera, how is 3D LiDAR resolution defined and calculated?
Global resolution
The term resolution is borrowed from cameras. A camera image has pixels distributed evenly across horizontal and vertical dimensions, so "horizontal pixels x vertical pixels" directly indicates resolution. For example, 1280 x 720 means 1280 horizontal pixels and 720 vertical pixels.
LiDAR emits points distributed in 3D space. These points refresh at a set rate and are called a point cloud. From a vehicle viewpoint, a single-frame 3D point cloud can be projected onto a plane to produce a 2D array similar to a camera image. If the LiDAR's point cloud is uniformly distributed, the number of points on this 2D projection can be used to describe its clarity, i.e. the global resolution.
For example, Hesai AT128 distributes points uniformly across its field of view. Its 2D projection also appears uniform, with 1200 points horizontally and 128 points vertically, giving a global resolution of 1200 x 128.
Not all LiDARs have uniformly distributed point clouds. Some concentrate energy in a central region, producing a dense center and sparse periphery. The dense central area is referred to as the ROI, or Region of Interest. For these LiDARs, global resolution alone is not sufficient to describe clarity.
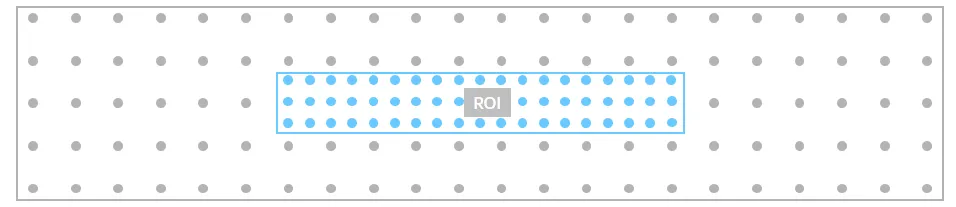
For LiDARs with ROIs and non-uniform distributions, two additional concepts are needed: point frequency and angular resolution.
Point frequency and frame rate
Point frequency is a more intrinsic indicator of the point cloud density in 3D space than the simple resolution counts. Under the same refresh rate, higher point frequency yields denser point clouds and a clearer single-frame view.
For example, 1200 x 128 = 153600, so why is the AT128's point frequency 1.536 million points/s? Because point frequency is the number of LiDAR points emitted per second within the 3D field of view. It multiplies the horizontal and vertical counts by the refresh rate, i.e. the frame rate.
For a uniformly distributed LiDAR:
Point frequency = horizontal pixels x vertical pixels x frame rate
AT128 commonly uses a frame rate of 10 Hz, so its point frequency is 1200 x 128 x 10 = 1.536 million points/s.
A 10 Hz LiDAR refreshes 10 times per second, equivalent to emitting 10 planar arrays per second.
Is a higher frame rate always better? Not necessarily.
For a given LiDAR design, the total number of emitted points per second is typically fixed. With the same total points, increasing the refresh rate divides those points across more frames, so per-frame point count decreases as frame rate increases. In practice, whether to use 10 Hz or 20 Hz is determined by the vehicle OEM. Most OEM algorithm teams currently require LiDAR output at 10 Hz.
It is also worth noting that point cloud density shown in demonstration videos can be altered by adjusting frame rate and video speed. Such manipulations do not reflect true on-vehicle density; OEMs and autonomous driving companies typically require testing on real vehicles to verify actual point cloud density.
Angular resolution
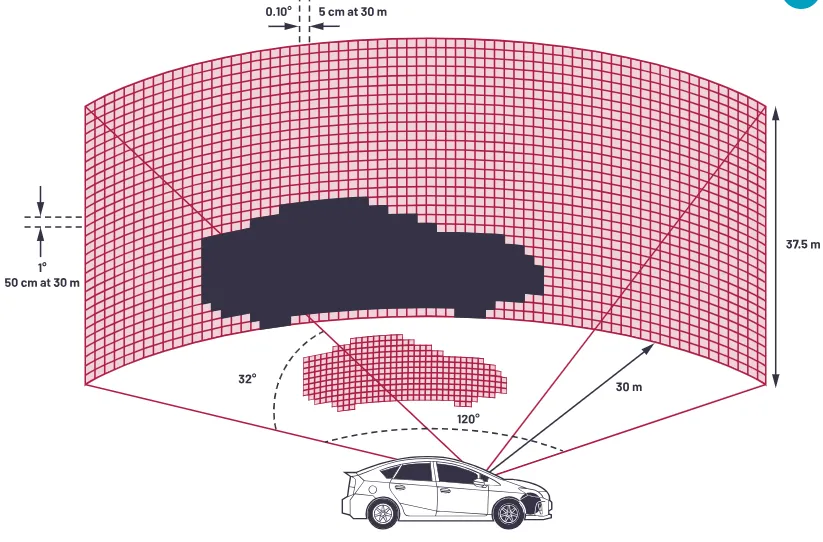
Angular resolution relates to the angle between adjacent laser beams. The angular separation between consecutive beams is called angular resolution, commonly specified as 0.2°, 0.1°, or even 0.05°.
The smaller this angle, the finer the angular resolution and the denser the resulting point cloud, which corresponds to higher resolution.
When the point cloud is uniformly distributed across the field of view, angular resolution directly reflects LiDAR resolution. The relationships are:
Horizontal pixels = (horizontal field of view / horizontal angular resolution) + 1
Vertical pixels = (vertical field of view / vertical angular resolution) + 1
For the AT128 with a 120° x 25.4° field of view and approximate angular resolutions of 0.1° horizontally and 0.2° vertically, these formulas yield the global resolution of 1200 x 128.
For LiDARs with non-uniform distributions, angular resolution is not uniform across the field. The ROI typically has a smaller angular separation, known as the best angular resolution. Product datasheets usually list angular resolution values for different regions. In some marketing materials, vendors may present the best angular resolution as if it were the average across the whole field; calculating point frequency allows verification of the true overall resolution.
Line count
Another commonly cited parameter is the line count, such as 96-line or 128-line LiDAR. Line count corresponds to the number of vertical pixels, a legacy term from mechanical spinning LiDARs whose vertical pattern appeared as discrete lines. The term remains in use today.
However, because line count only reflects vertical pixel count and does not indicate horizontal pixel count, it cannot alone represent overall LiDAR resolution.
All else equal, more vertical lines are beneficial, but line count should be considered together with other parameters.
LiDAR entering the 2K HD sensing era
In summary, global resolution, angular resolution, and point frequency are three metrics used to describe LiDAR resolution. Point frequency is the most general and objective indicator, and the three metrics can be interconverted. Frame rate is adjustable and commonly set to 10 Hz or 20 Hz.
With advancements in autonomous driving, maximum achievable LiDAR resolution continues to increase.
As LiDAR technology progresses, higher-resolution point clouds will provide richer spatial information for perception systems.