ALLPCB
ALLPCB


Overview
Star and mesh networks are two fundamental architectures for IoT wireless networks.
With Bluetooth mesh recently gaining attention, mesh networks are likely to become more widespread over the next few years, especially in applications where thousands of IoT nodes must communicate across large geographic areas. Mesh networks can support building automation, energy management, industrial automation, and asset management.
To highlight the advantages and limitations of mesh networks, this article discusses the basic characteristics of star and mesh topologies and then uses a typical Zigbee mesh network as an example. A later article will examine Bluetooth mesh networks separately.
Choosing an IoT Wireless Solution
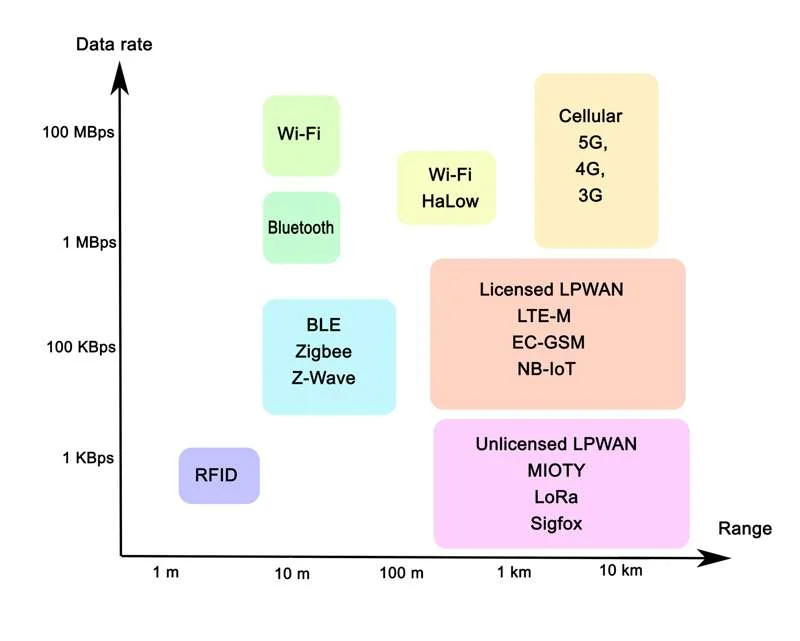
IoT applications can use a variety of wireless connectivity solutions. Given the broad range of use cases, selecting the right wireless solution to meet a given IoT application's requirements can be challenging.
When choosing a connectivity solution, consider range, data rate, security, power consumption, and scalability.
Network topology — how sensors, actuators, and gateway nodes are arranged or interconnected — is another key factor that affects network performance. The two basic IoT wireless network architectures are star and mesh connectivity.
Star Topology: Advantages and Limitations
Star topology is shown in Figure 1.
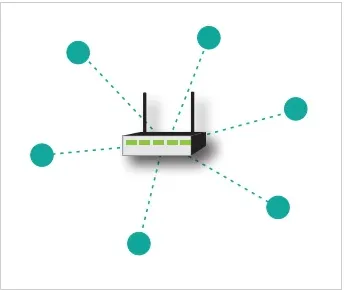
A star network consists of a central hub to which all other nodes connect. Nodes communicate with each other via the central hub, which in most cases also serves as the gateway to the internet.
A home Wi-Fi network is a familiar example of a star topology: phones, tablets, and printers connect to a central hub (wireless access point). The hub functions as the local router and the internet gateway.
Because the hub is responsible for distributing packets across the star network, messages can reach their destination via a single "hop" (transmission between a node and the hub) or two hops (transmission between two nodes via the hub). This typically yields fast networks with consistent and predictable performance.
Another advantage is that star-based IoT networks can easily identify and isolate faulty nodes, since each node has an independent connection to the hub.
However, the central node is a single point of failure: if it fails, the entire network is affected.
Another major limitation of wireless star connectivity is that all nodes must be within the direct radio range of the central node, which restricts the physical size of the network. Star networks also lack flexibility to route around RF obstacles or areas with high RF interference.
Mesh Networks: Full and Partial Mesh Topologies
In a mesh network, a node can communicate directly with multiple other nodes.
There are two types of mesh networks: full mesh and partial mesh.
In a full mesh topology, every node can directly communicate with every other node in the network. In a partial mesh, each node connects directly to one or more other nodes, but not necessarily to every node, as illustrated in Figure 2.
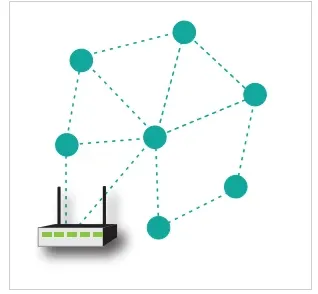
IoT applications typically use partial mesh topologies to extend network range.
In mesh networks, nodes can act as forwarders and route data through the network, so there are multiple possible paths between any two nodes. This redundancy improves resilience: if one path fails, another can be used to deliver data.
Because nodes can act as relays, nodes that are not within direct radio range of each other can still communicate via intermediate routing nodes. This is a primary advantage of mesh networks for IoT, as it allows the network to extend beyond the radio range of a single node.
The trade-off is that multi-hop communication increases latency for packets traversing the network. The number of hops and the network latency depend on how many routers a packet crosses, making performance assessment more complex than for simpler structures like star topologies.
In such cases, quality of service (QoS) metrics can be used, for example the proportion of transmitted packets that reach their final destination within a specified duration (such as 300 ms).
Routing nodes should implement routing algorithms to deliver packets efficiently. To support these routing functions, routing nodes require more processing power and memory, which increases their complexity and cost.
Zigbee for Star, Tree, and Mesh Topologies
Zigbee is an open standard designed for low-cost, low-power wireless IoT networks.
Zigbee is based on the IEEE 802.15.4 link layer and operates in unlicensed bands such as 2.4 GHz, 900 MHz, and 868 MHz. It supports star, tree, and mesh topologies.
A typical Zigbee mesh network is shown in Figure 3.
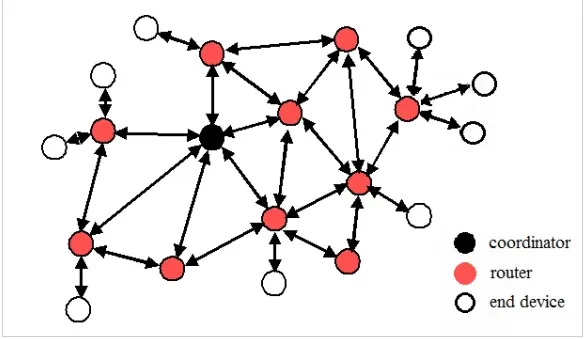
Radios in a Zigbee mesh network play different roles. Nodes can be coordinators, routers, or end devices. The coordinator sets up the network and allows routers and end devices to join. In addition to creating the network, the coordinator manages network security.
Router nodes are always listening and route the information they receive through the network. These nodes are typically mains powered.
End devices do not route information. They remain in sleep mode to conserve power and periodically wake to poll their parent and receive messages addressed to them. End devices are typically battery-powered nodes.
Zigbee mesh networks can self-form. When nodes leave the network or fail, the network can reconfigure routing paths based on the new node set. This self-healing capability improves network resilience under changing conditions.